How should one properly manage the taxi speed of the Kodiak? It seems to get going rather fast even on idle.
I’m guessing in real life, you would go in and out of beta range on the throttle to manage thrust and control taxi speed in addition to using the brakes, but I have a Bravo throttle quadrant setup with the throttle detent set for reverse thrust… there’s no in-between - just idle and reverse.
Do I just use thrust and brakes to control speed? Is there any way to actually get the full beta range on the Bravo?
I do watch his stuff once in awhile - and I agree it’s interesting, but he has dozens of hours of content… it’s a bit of a commitment. I think the wealth of knowledge here is much better for getting specific questions answered.
What I mean is that in MSFS turboprops, when you pull the throttle past the gate to below flight idle, they seem to all instantly go into low reverse prop pitch and quickly come to halt and even start inching backwards. This seems to apply to all of them including the high fidelity third party ones, with apparently no tools to address or work around it in the SDK. To my understanding what should instead happen is that below the flight idle there should be a beta range of low positive pitch before the propeller finally switches to reverse thrust proper.
This is a taxiing/runway roll issue, since no turboprop is supposed to go below the flight idle during flight. Those turboprops (Porter) that are exceptionally certified to use beta for beta descent in flight have some limited beta range on the flight side of the throttle. (Though in practice the beta descent is not modelled on the Asobo Porter, the Milviz one can do it though probably due to some kind of workaround)
For the requested source, I found this post from SWS (Kodiak) developer:
There’s also an issue with controls supporting a beta range… for example, the Bravo doesn’t have an axis below the detent… just a switch. In order to properly implement beta, we would need a throttle that has an axis below the detent.
Even then the sim doesn’t support it without a little tweak.
For reverse, set your physical throttle at its idle detent, then on the sensitivity page adjust Neutralcso that the white dot is on the centre horizontal line. Moving it back past idle will now be Beta, and onscreen you would see the white dot travel up to the top right.
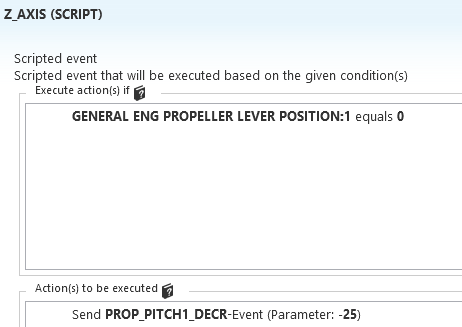
For prop feathering you can’t even do that as there is no negative on the axis. For that I use SPAD to do things. Bring the prop lever all the way back to feather will set it to 0. I then have a conf if that checks for that then moves the axis to -25, feathering the prop.
This last one works great on all planes I have tried with one exception: the analog Caravan. I have no idea why, but it works great on the Kodiak.
Reverse is in sim for me, but prop feathering is not.
From what I have read the Bravo doesn’t have an axis for reverse, but a button essentially toggling reverse. I don’t own one to test, but in theory you could assign any point on the axis as Neutral, and everything aft of that point would be reverse. That’s essentially what I do with the TQ6+. It doesn’t have an axis for reverse either, but the idle detent has I believe a ball bearing that you to move over to go past Idle. That is where I set Neutral. If I had it mounted above me, in reverse like in the Twotter, I could set the Neutral point anywhere but I couldn’t change the physical Idle point without some major tinkering.
The difference between a button for reverse, and the Neutral point method is that I have an actual portion of the axis for reverse, so variable amounts of reverse thrust, not just full on or off.
Interesting that you can’t implement feathering. It’s there for me, and the video I linked above shows how to bind it to a latching button (which is what is on the bravo past the axis detent).
Edit, what is a safe or permitted taxi ground speed at most airports. I expect I’m way over that, bombing around at 25-30Kts
I have implemented feathering, and I don’t need to use a button to do it, just the axis. When the lever is fully aft it moves into feather. My TQ6+ doesn’t have any buttons on it, just 6 axes.
To get around a limitation in the sim, which mean the axis can’t go negative, I make 0 = -25.
What Asobo should do is make 0 equal fully feathered not -25, and move the entire axes upward.
I.e. when you move the prop lever from the firewall to the detent it thinks you are moving prop pitch from 100 to 0, when you move the lever past the detent it thinks you are now moving it back from 0 to 100 except now it’s working the reverse range since the throttle is inputting the reverse command at that range via virtual button.
You can do that with AAO (or Joystick Gremlin), but I don’t think I checked Spad’s support for virtual buttons when trialing it against AAO. (AAO might actually have built in support for negative pitch as part of it’s pitch axis assignment, can’t recall off hand)
When the lever is at 0, it sets the Prop pitch to -25, which is what it gets set to if you monitor that simvar and move the prop levers into feather using the virtual cockpit controls.
Oddly the “set” commands don’t seem to work, only “DECR”, and I assume “INC” though I have never had a need to use that one.
Because it only gets set at 0 it doesn’t generate loads of useless events, it only sends once, and advancing it forward of 0 takes it out of feather. It works really well.
Yeah I got it. My suggested method would give you (functionally) that 100% to -25% axis instead. In practice you won’t ever really be putting the prop lever past the detent except when moving it to fully feathered position, so being able to set the prop to any position between 0% and -25% is bit of an unnecessary nicety.