yes, by collected „wisdom of the community“ this is a three component problem
MSFS sim flight model is still „emerging“ regarding side forces, there is much discussion about lack of crosswind realism, excessive side forces etc.
Milviz/Blackbird is not top of the crop when it comes to flight model realism. Flyable, but don‘t expect realistic performance within small margins. They are also reluctant to update their models once better options become available in the growing SDK, compared to other developers.
tail draggers ARE hard to control laterally on the ground, one needs to learn the skill of the „rudder dance“, and arguably it is harder in the sim than IRL, due to lack of „seat of pants“ feedback in the sim.
The PC-6 also should demonstrate strong adverse yaw IRL as by IRL pilot reports, but this one demonstrates almost none. Still can be fun hopping around in it, enjoying the landscape and short field performance.
It is true, there is a lot of discussion on the realism concerning ground handling. For me, this works fine for most planes (including other tail draggers such as the savage cub). Since the PC6 from Milviz just came out on Xbox and the developer (Krazycolin) asked for specific feedback on the console version, this is my experience: Everything works great (so far), just the problem with the ground handling. So I hope that this is something that could be fixed in the future.
I would not be so negative. Some issues get fixed and some not. Up in this thread, the developper asked for specific feedback on the Xbox version and I gave mine. So let’s see. There are really possitive examples. For the C414, after the latest update we had the problem on Xbox with the throttle control. It was reported here by users, it was appreciated by the devs and we got a hotfix within 2 weeks
We know that the SU9 ground handling values -particulalrly the 2 for lateral high speed tire friction- have not been applied to the current build of the PC-6.
Which is a shame as we know from aircraft like the SWS Kodiak and the CJ4 it can make a huge difference to obtaining more realistic ground handling in crosswinds.
It’s only a 5 minute job to add the lines of code. Finding the optimum values takes longer as that’s a flight testing process, but something the size and weight of a PC-6, the scalar values will probably need to between 8-10 for the mains and maybe half that for the tailwheel.
I would have a go at doing the modding and testing myself, but as I made the error of buying through the Marketplace, the flight_model.cfg file is hidden or encrypted. I’m so keen to try this (as I really DO like the PC-6 and want to do a series of tutorials on how to fly it like I did for the Kodiak), I’m contemplating buying it again direct from Blackbird so I can get modding and testing.
That would be awesome if you could try your skills on improving the flight model realism of the PC-6.
I also like your youtube tutorials. I like how you wait and study an aircraft for a while before you post a video about it. So refreshing in the mass of youtube ‚reviewers‘, who in the pressure of the business model of youtube - first gets most clicks - rush to get something out. Embarrassing when some of them who are even real pilots don‘t catch the most basic realism flaws of some of the new releases then, due to taking no time for in depth flight testing. So hard to find actual solid information about new releases. (that we can‘t test planes before purchase doesn‘t help either)
Keep up the good spirit for promoting the realism.
I am flying on Xbox & this PC-6 I have been waiting for for a long, long time.
That´s why I got it right away last Thursday when it was released for the console.
I am having a blast with it, but 2 things I noticed, that are odd.
The flap position indicator does not change in the little extra gauges (which you can select under "assistance options / user experience / instrument heads up display) when operating the flaps.
In the Tundra tire / Analog version of the plane, you can not select “Tiedown Blocks” and “Chocks” on the tablet.
(in the Tundra tire / Glass version you can select them, but they DO NOT show up visually & in the Standard tire versions they are selectable and DO show up on the outside)
P.S. Thanks a lot for collecting feedback and your support!
Thanks for the report. These issues appear in the PC version as well. It looks like the tiedown and chock options are not supposed to be there in the glass version and need to be removed from the tablet (they don’t apply to the tundra versions)
The trim indicator arrow in hud view moves but always appears to be 0 unless they are fully deployed then it shows 38.
The Pilatus PC-6 ingition switch is an on/off switch in the cockpit, but only has a momentary toggle in game keybind options.
Additionally, the PC-6 does not have the Bus Tie switch, the Gen Reset, or the landing lights position modelled. Perhaps this is a Blackbird Simulations issue. Consequenlty, these must be activated by a mouse click.
I spent the morning building a button box for this aircraft, but some of the buttons can’t work due to game/module issues. It’s a pity.
Yes, the bus tie for example uses the MSFS event ELECTRICAL_BUS_TO_BUS_CONNECTION
Pretty much everything can be bound, just not using the in game control options. Some animations are B events and may not animate if the event is triggered on an external device (eg the flaps lever animation)
Since I really dig turboprops I finally rolled the dice on this PC-6.
This is one seriously well modeled aircraft! I wish I had gotten it sooner
If you are into turboprops, this one has to be in your hangar.
I still have problems landing it in a short distance, and putting it down where I want.
With Black Square Caravan, for example, I have never had any issues landing. Fly it in, stall it in, it’s all good. The PC-6 is giving me more issues in that I tend to float too long. Probably I am going too fast, but when slowing down too much I feel like it is going to come up short.
It is getting better however, so more practice will tell.
One question though. When can you engage the reverse thrust? On short strips I would normally - Caravan, Kodiak, … - rather quickly increase the reverser, but I have the feeling that the PC-6 sometimes does not listen, or only after my wheels have been on the ground a while.
Is this due to something prop related, where it first has to enter beta mode? And because of short power bursts right before landing they are not there yet?
I find that if I do a well-planted 3-point landing and put it in reverse thrust, it will stop mighty quickly. Not noticed any particular lag in reverse thrust being produced, not compared to other PT-6 aircraft. Not that I’ve sat and timed it.
I think the landing technique used is the more important factor in determining stopping distance. Doing a wheels landing, I find it will not drop the tail on its own - it wlll just trundle down the tarmac at 52knots (Landing flaps, throttle idle, HI IDLE and no brakes) - the pilot must bring the tail down. Maybe grass or rough strips would help slow it, but given this and the higher landing speeds typical of a wheels landing, I would always opt for a 3 point/ or stall landing on a short field, based on my experience so far.
Would be very interested to hear from other PC-6 pilots though what landing and take-off techniques they prefer, especially in a cross-wind.
Yeah man the Porter is top tier. I also feel this delay sometimes when trying to use reverse thrust. Usually I’m in a panic (well not really but you know what I mean, time is short!) and sometimes it doesn’t engage so when I apply power again having assumed it’s switched to reverse (I use a toggle switch) but it hasn’t and I’m accelerating again. Not a good time to be doing that! Half the time I have to take off again and go around! Adds to the excitement I suppose
I’ve bound reverse thrust toggle to various controllers so it’s there handy depending on the plane I’m using.
On my Saitek X52 throttle it’s on one of the buttons so I can hit it with left finger without releasing the throttle.
On my Logitech TQ I had it on the throttle “down detent” but that was really flaky (maybe failing switch even though it’s a brand new unit, but the same switch died on another brand new unit - not the best build quality!) so I’ve moved it to one of the rocker switches and I can sort of press it with the ball of my thumb as I move the throttle lever down.
On my Honeycomb yoke it’s on the button on the back of the left handle so I can flip it without taking my left hand off yoke and hold right hand on the throttle lever ready to push it forwards again.
In the Porter I use that TQ and joystick (so I have to cross my left arm over to the TQ coz joystick is also mounted to my right) as it’s more like the throttle in that plane. I just wish there was a more evident audio and/or visual cue if it’s engaged so I can take that info in before I apply power again.
It would be easier to use the left hand Saitek I suppose if a bit unrealistic but I guess you would hold the stick with your left hand in the real Porter?
So on either the controllers that have an axis that has a button beneath a detent on the axis (like the HC Bravo), you can use that button. - that more closely mirrors the real behavior of the throttle axis and means you don’t have to take your hand off the throttle or anything else!
The trick is not to use the ‘toggle reverse thrust’ command. That is flakey and doesn’t always engage, leading to confusion and misapplication of forward thrust on landing!
What you can do instead in MSFS control options is bind [EDIT] ‘THROTTLE DECREASE’ to the button below the throttle detent, to be activated ‘on press’. Then you also bind ‘Throttle cut’ to the same button, but ensure that it is activated ‘on release’ (you usually have to do it twice as for some reason it never recognises the ‘on release’ first time you assign it). I;ve set it up on Button 25 on the HC Bravo in the example below, which is the button below the 2nd axis from the left (‘Joystick L-Y axis’)
What this means in practice is that as you pull the throttle down through the detent, it will hold reverse thrust. When you are done with the reverse, just put it back to the detent and as the button is released, it will set the throttle to zero. All the angst of the ‘did-it-didn’t-it?’ toggle avoided!
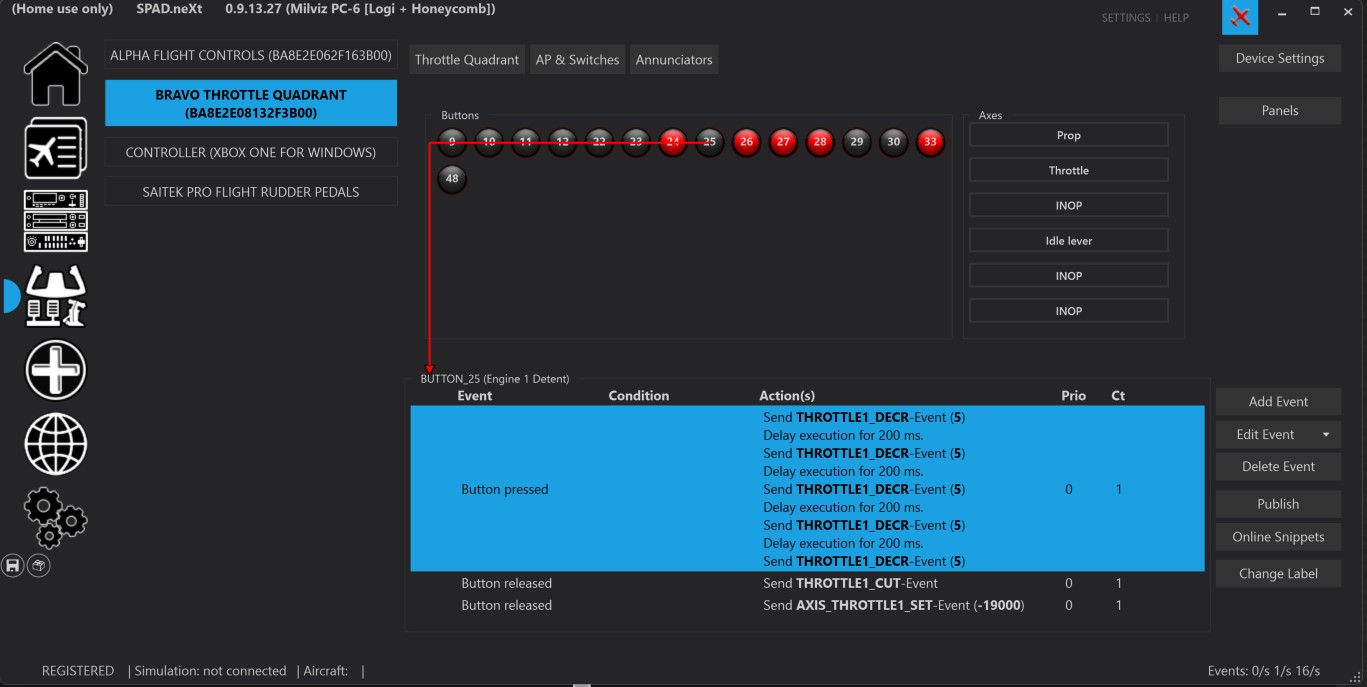
In SPAD.next, I achieve the same result, except I have it engage in increments, so it just doesn’t go to full reverse immediately, but takes 1 second to phase through to maximum:
That is exactly what I experience. There must be some condition that triggers this. It couldn’t possibly be something like “all three wheel must be on the ground”.
Good explanation but I am afraid my warthog throttle will not allow to do it this way. [EDIT] this is wrong.
It would be perfect if MSFS would recognize the range between the detent and the stop.