The RNAV(GPS) 24 approach at my home airport KELM is that way. The LNAV/VNAV DA is 1807 feet with 2 1/2 mile visibility, while the LNAV MDA is 1740 feet, with 2400 RVR (Category A), 4000 RVR (Category B) or 1 3/4 miles (Category C and D).
The LPV DA is the same as the ILS MDA at 1155 / 2400 (all categories).
The LNAV/VNAV DA for the opposite end (runway 6) is even higher at 2234 feet, 3 miles, while the LNAV MDA is 2040 feet and 3/4.
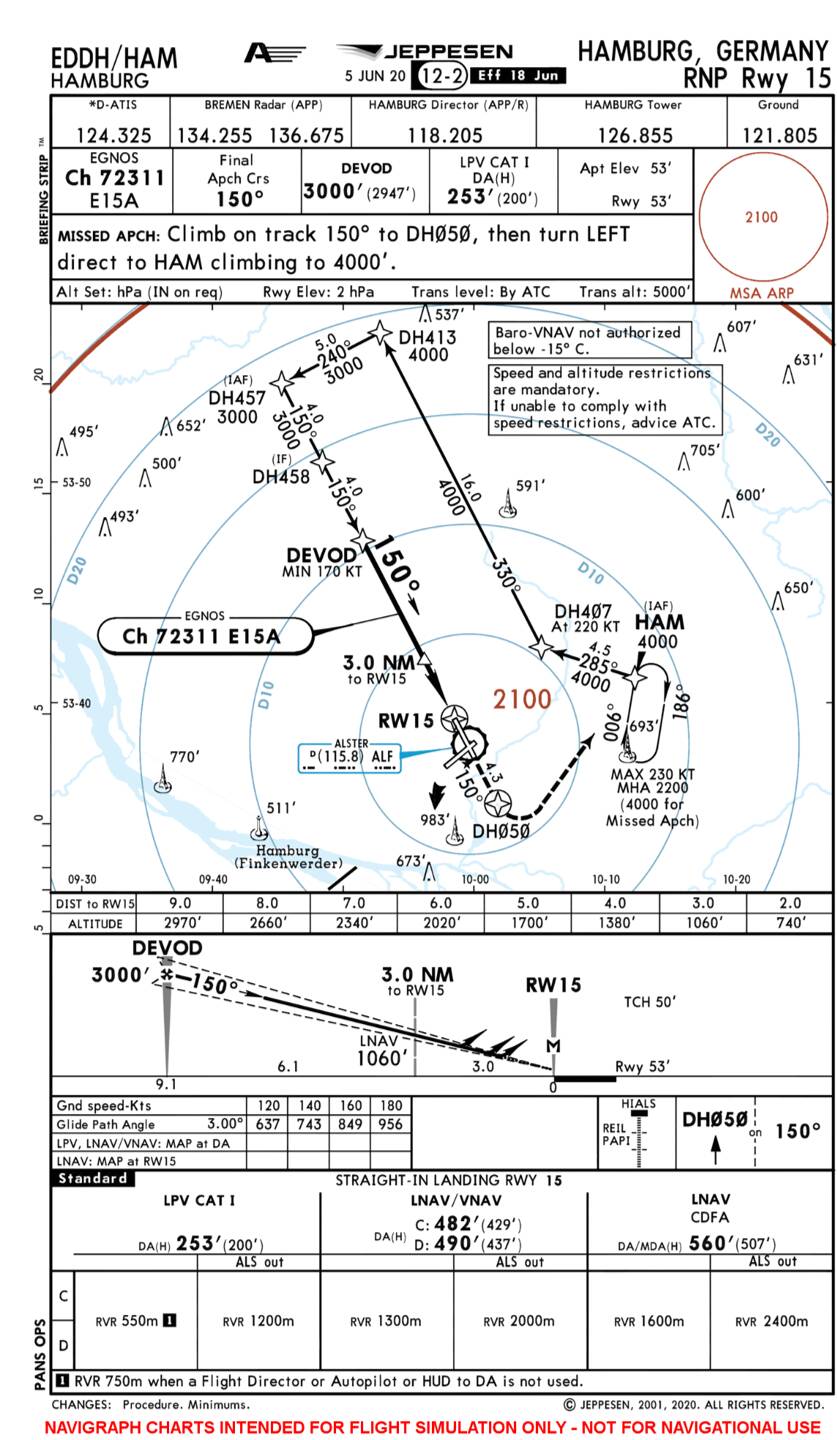
Looking at a few Jeppesen charts for RNAV approaches at various European airports they list DA minima for LPV and LNAV/VNAV just like we do – so far so good. But for LNAV they seem to list “DA/MDA” minima. What does that mean, is it a DA or an MDA? Because it cannot be both.
I’m not using Jeppesen in real life but what I remember is that Jeppesen just took the non-CDFA MDA and used them as CDFA. It’s still a MDA really, you need to correct them in order not to descent below them in a missed-approach.
I got exactly the same minima btw on the latest charts I have.
So in the LNAV case above, where it days "DA/MDA(H) 560’ ", that is actually an MDA? Whereas where it says "DA(H) 253’ " that is a real DA? Or are both actually MDAs? That is confusing.
Seems to be a thing on Jeppesen charts for European airports. For US airports the Jeppesen charts match the official FAA charts: LNAV/VNAV and LPV have a published DA, LNAV have a published MDA.
Normally precision approaches have a DA/H, RNAV approaches are not really precision approaches but fall in their own categoty: APV (Approach Procedure with Vertical guidance). APVs have a DA/H just like an ILS, MLS and PAR.
All non-precision approaches (including LNAV and LP) have a MDA/H, but in real life we only fly CDFA nowadays instead of levelling of at MDA, so we need to convert those into a DA/H by adding a correction based on the aircraft category.
Yes, that makes sense. That part I get. The part that gets confusing is who does that conversion.
In the US it is the FAA for LNAV/VNAV and LPV approaches where the published minima is DA, or the pilot for LNAV approaches flown as CDFA where the published minima are MDA.
In Europe I thought it is always the pilot and the published minima are MDA, and I think that is what you are saying too.
But then I come across these European Jeppesen charts with listed DA or “DA/MDA” minima and get all confused, should the pilot further correct those, or did Jeppesen already correct them, or what. Or maybe I just need more coffee, that is a distinct possibility.
For published DA/Hs we don’t add anything, for MDA/Hs we need to add a correction to convert them into a DA/H.
The Jeppesen DA/MDA is stupid, I think what they are trying to say is - it is a MDA but you are not gonna level off there so you have to use it as a DA. It is up to the operator to come up with a correction to convert those into DAs. Just forget the “DA/MDA” it is a MDA.
I guess it will show the same “DA/MDA” non-sense on other non-precision approaches using CDFA, VORs, NDBs etc.
If the non-precision procedure is published as CDFA I’ll trust the given DA/H value for the approach, else if a MDA/H is provided and I want to fly it as CDFA I’ll add the 50ft to the published MDA/H. Correct?
Yes and no, you won’t find any DAs on a non-precision approach CDFA or non-CDFA, basically everything with vertical guidance (precision approaches and APVs) have DAs. Non-precision approaches all have MDAs so on all non-precision approaches you’ll need to add a correction to be able to use them as DAs. I’m not 100% sure if its the same in the US and with Jepessen, but from what I understand from FlyingBear01 it seems so.
The actual correction should be based on the aircraft, I have flown turboprops where we used +30 ft the type I’m currently flying is a heavier and faster, therefore needs more altitude to change flightpath so we use +50 ft. It is up to the operator to establish this.
The bottomline is, you are allowed to descent below the DA. At the DA you’ll decide whether to land or go-around, if the decision is made to go-around it takes time to change the aircraft flightpath and revert into a climb, concequently you would have descended slightly below DA before positive climb is established. This is already factored in so this is fine. You are not allowed to descend even a foot below your MDA so the decision to go-around has to be made above MDA in order not to descend below it.
Some additional information about WAAS and using GNS430/530 units for doing RNAV approaches.
Not every GNS 430/530 is WAAS capable. If you want to use your GNS IRL for WAAS approaches, you have to send it to Garmin and they will overhaul and update your unit. Also, it’s possible that you have to replace your old GPS antenna.
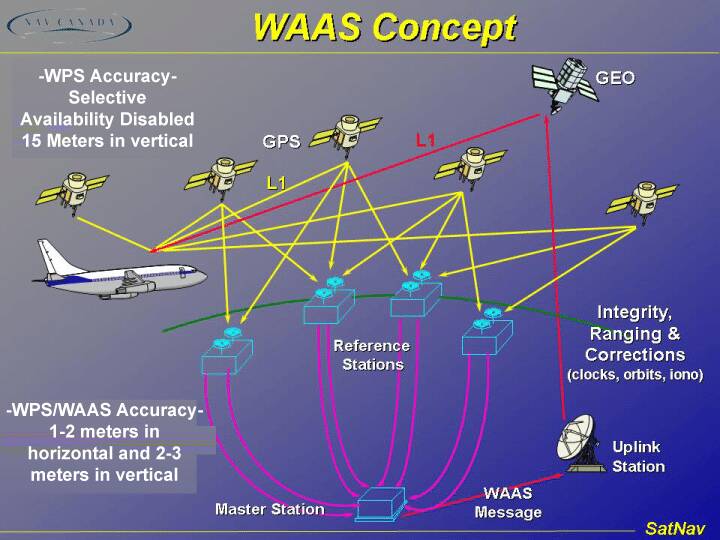
While normal GPS system are using 4 satellites, one for UTC transmission, one for altitude transmission and two for cross bearing positioning, WAAS uses an additional geo stationary facility. This “Virtual Satellite” knows exactly where it is located, regarding his coordinates on the earth. So, the calculation of your position can be done more precisely and is capable of replacing an ILS.
I might be wrong but GPS satellites don’t send altitude, geometric altitude is computed by the GPS receiver by comparing the 3D position with the WGS-84 ellipsoid. All satellites send almanac including UTC time, and at least 3 satellites are required for any 2D position, 4 satellites for a 3D position and 5 for RAIM. And all satellites know exactly where and in what orbit they are, thats kind of the working principle of the whole GPS system. And I thought all GPS satellites are in MEO and not in geostationary orbit.
You are right, that 2 satellites are enough for 2D and that the altitude is calculated in the receiver, using almanac (Operating Software of GPS) . But, when flying 3D, one satellite will be used to calculate the altitude of your aircraft using the runtime measurement of your signal. The calculation is done, everytime, with the receiver of course!
Also, all satellites know their position, but there is always an error, cause they never fly exactly the same orbit. That is, why you don’t get the precision on normal GPS like in WAAS. Due to a calculation that is based on a geo stationary coordinate, the satellite can correct their orbital error and you will get a perfect positioning.
As you can see, there is one satellite communicating with an uplink statiom, that is called Geo. This one distributes the coordinate for all further calculations to the GPS receiver. Also, every satellite got a reference station on the earth for correcting his orbital error.
It is also possibly, that there are other ways of this system. There are so many different technologies this days (WAAS, SBAS, Galileo etc.)
2 satellites are not enough for a 2D position to be clear, at least 3 are required.
The GEO satellite is not a GPS satellite, its a communication satellite. As I understand it does not play any active part in the GPS system itself other than relaying the user message from a ground station (which contains the corrections per satellite). The position of the GEO satellite is therefore not important nor used to calculate positional error.
The way it works is that the ground stations (not the geo satellite) know their exact position and calculate the positional error, send the correction to the master station which beams it to a geostationary communications satellite which relays it to the user.
I still don’t get your altitude explanation, as far I know the GPS receiver calculates the 3D position (of which it needs at least 4 satellites) and references this 3D position to the WGS-84 model inside the receiver, this is the geometric altitude. You just can’t calculate any altitude based of 1 satellite only.
Just to reply to the original OP question, I’ve flown a RNAV APP with X-Plane11 G1000 which is pretty much accurate, and it does work as stated above, that is you can stay in ALT mode at the altitude published for the IAF and hit the APR button when GP (magenta) has come alive. This will have the plane follow the appropriate GP until MDA(H)/DA(H). In this case the Garmin had a LPV procedure selected so the minimum was actually a DA(H). At 1000ft AGL select MAA end continue approach. Upon reaching DA disco AP and manually fly to the threshold.
I’ll try the same with MSFS and report back if it’s working the same way.
The followed test RNAV APP:
Had a ■■■■■■ wording there, not the satellite is in a geo stationary orbit. The ground station behaves like a virtual satellite. Off course, all satellites are capable of transmitting the UTC f.e, but they are gonna split the exercises in operation.
As you can see in the picture above, the satellite is only doing the communication, you are right there, but it is still very important for the calculation. Every satellite in the network got a reference station on the ground with a fixed geo stationary coordinate. This coordinates behave like a calibration source for the correction of a possible orbital error if the satellites. The coordinates will also be summarized, calculated and send to the master statiom, that will generate the WAAS message and send it to your receiver. This is the signal, that makes WAAS possible!
I don’t know, how the WGS84 interacts im calculation. But, I am sure for altitude you are simple using a runtime measurement of your signal, fixed to one satellite.
Your satellite knows his altitude. Let’s say it’s 400000 meters. The signal is going by the speed of light. Now you can simply measure, how long the signal needs to get received and transmits back. Out of that you will get a height, that you will reduce from the satellites altitude.
Ah then we are on the same page regarding the satellites at least .
Your altitude explanation would make sense only if the satellite used for calculation is directly overhead the aircraft, otherwise its only calculating the slant range which is exactly what the GPS system does for every satellite. By the way there is no signal being beamed back and forward (no round trips). Its only the GPS satellite which sends the signal and your GPS receiver, as the words says reveives it.
The way it works is that the GPS satellite send a signal, the GPS receiver receives the signal, can see at what time it is send and based on the time received and the speed of light calculates the range. The GPS receiver knows the position of every satellite via the almanac so it can draw a sphere around the satellite, three of those spheres are required for a 2D position, the place where they intersect is your postion, for 3D you need 1 more. All the work is done inside the receiver. The GPS satellite is a stupid device pinging signals, nothing more, nothing less (ok it sends almanac data as well).
Then the receiver has a model of the Earth programmed in, called the World Geodetic System from 1984 (WGS-84), this is an ellipsoid representing the Earths surface. Its a clean model, no mountains or anything, just an approximation of the shape. All waypoint coordinates are based on this WGS-84 models, there are some other models in other areas around the world and that is why you should turn off GPS updating the FMS / IRS position when flying in those parts.
Yeah, that is exactly the same i meant for the altitude calculation. At least, it measures the time the signal needs to travel, so it is a runtime measurement. To be honest, I didn’t know the other components and factors, just had this information. At least, we meant the same thing, yours is just way more detailed.
To clarify, altitude is NOT calculated by the time the signal needs to travel, not directly at least. The GPS calculates its own 3D position using at least 4 satellites and then compares this position to the model of the Earth which has been programmed in. This geometric altitude is the altitude above this model, it serves very little purpose other than TAWS system onboard and some RNAV approaches but its not directly useable to the pilot.
The way you are describing it would only work if a satellite is directly overhead your position.
Yeah, I did understand it the first time, I guess. You mean, the Satellite is virtually calculating the time the signal travels by a position the satellite will be (Like a database of the orbits of the satellites). Due to the other satellites, it can create like a virtual runtime measurement directly over the aircraft? Am I right?
Well the satelite does not do or calculate anything, it’s “stupid”. It only sends a signal which includes the time the signal was transmitted.
The GPS receiver receives the signal, knows the time it was send, knows the time it was received and it knows where the satellite is at any point in time due to the Almanac. so it can draw a sphere around that satellite. Do this with multiple satellites and the point where all spheres intersect is your location. So everything happens inside the GPS receiver, the satellite is passive and only send signals.
There is no real communication between the receiver and transmitter. It can’t work like that because every device has a GPS installed nowadays, its impossible for the GPS constellation to communicate with every electronic device on the globe .
Nothing happens when a satellite passes directly overhead, I was trying to say that calculating altitude the way you are describing would only work with a satellite directly overhead, but it doesn’t work like that.