Well its quite complex so I do understand they leave it up to the operator. I believe LIDO is customizable to the operators needs (its what I’ve heard, I never used LIDO myself), also Navblue is customizable to the operators needs, we had our departure procedure in case of engine failure directly on our departure plates for example, maybe there is also an option to have the minima adjusted to the operators needs but it will probably cost money.

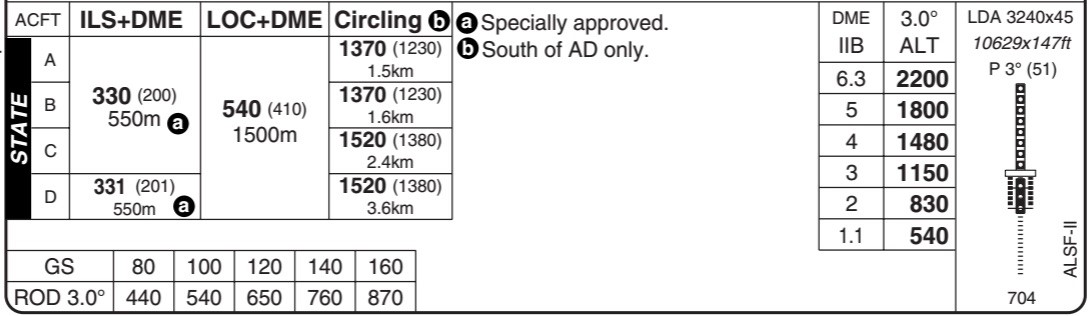
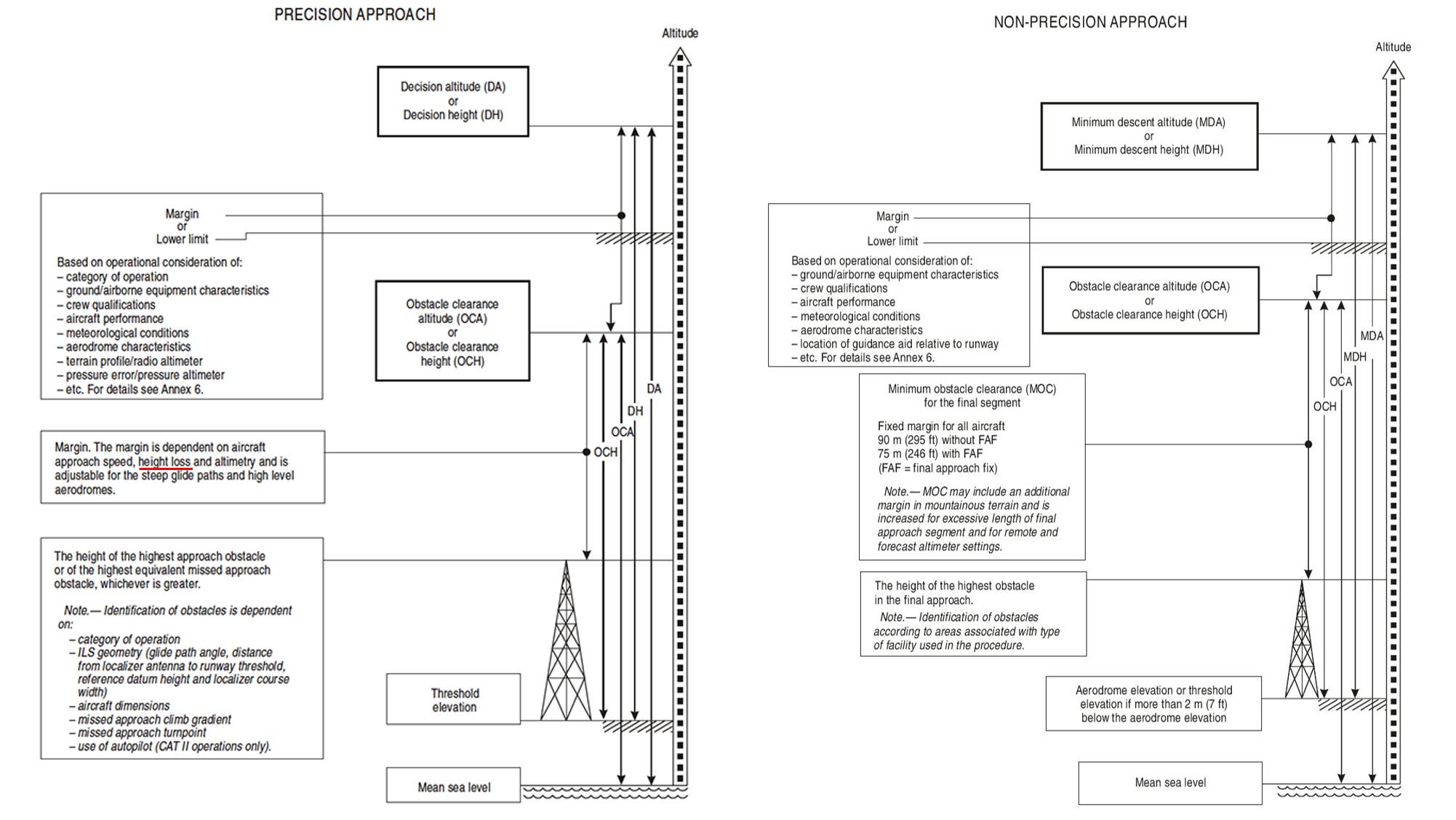
There is more to it obviously, in Europe the eAIP charts only show the OCA/H. If you compare the eAIP charts with the Navblue and Jeppesen charts you can see that the OCA/H are directly copied for precision and for non-precision approach. For precision approach the OCA/H DOES include a height loss correction whereas the non-precision approach OCA/H does not.
Traditionally non-precision approaches where flown non-CDFA (Continuous Descent Final Approach) where you would descent to the MDA/H, level off and fly to the Missed-approach point which is a DME distance, beacon or marker, then decide to either go-around or continue for landing, like this:

The industry has moved away from non-CDFA approaches and non-precision approaches are therefore flown as CDFA nowadays without level-off, it didn’t make sense anyway to level-off with a big jet and fly level at a few hundred feet and then try to land if runway was insight at the missed-approach point. Note that there is no guarantee that the aircraft is even in a position to land at the MAPt, just see where the missed-approach point is located in the above approach (runway threshold), no way you will be able to land safely when runway is insight at the threshold at 740 ft above ground ![]()
![]()
![]() .
.
So even before non-CDFAs were largely abandoned most operators already flew a 3 degree glidepath to the MDA + height loss correction or MAPt whichever occurs first and then performed a go-around. Its also not exactly in line with the “stabilized” approach concept either to level of your large jet at a few hundred feet and fly level, then cut the power and continue descent. Some non-CDFAs still exist today, for example procedures based on only one beacon and no DME often have a non-CDFA design (there isn’t really another way), nowadays most planes can fly RNP approaches of course so its not often flown operationally. We are not even allowed to fly a non-precision approach non-CDFA (company procedure).
The same approach now looks like this:

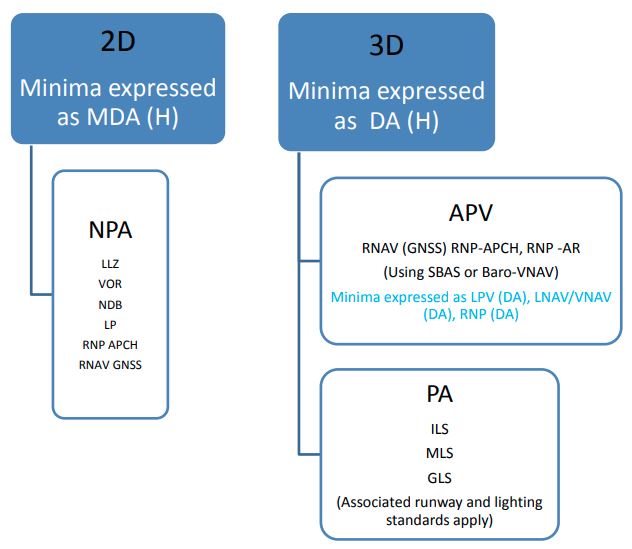
Sorry for the long essay, but the point I’m trying to make is that the way OCA/H were determined for non-precision approaches (as a MDA/H without height-loss correction) did make sense in the past but with the abandonment of non-CDFA approaches it doesn’t make sense anymore and unless the state publishes a OCA/H including heigh-loss correction for non-precision approaches, companies like Navblue and Jeppesen just copy the OCA/H and leave it up to the operator. Which doesn’t explain why Jeppesen calls it a DA/H, that just stupid for the lack of a better word and causes a lot of confusion amongst pilots.
Contrary to what I said before, APV approaches do seem to have a heigh-loss correction added to the OCA/H and therefore can be used as DA/H directly. So only for non-precision approaches (VOR / NDB / LNAV / LP) this height-loss correction needs to be applied if not applied by the state. For APV (Approach with Vertical Guidance such as LNAV / VNAV and LPV) and precision approaches (ILS, MLS, GLS) this is already included:
 But it’s good to know the rules, even when you break them.
But it’s good to know the rules, even when you break them.