Two words… USE TRIM
It could also have to do with the joystick sensitivity. But it’s fair unbalanced I agree.
I hand fly the Cessna , all of them and use trim a lot, just like I was taught at the flight academy. just after take off, around 300 AGL I would start trimming. Also on base and final approach.
Specially important on the heavier 172, I could not trim de 152 a d still do okay.
I don’t have problems in the sim , maybe sometimes when I activate AP and select a big number on the VS which of course it’s caused by the sudden move of the controls.
Those are nice plots! Which tool are you using for that?
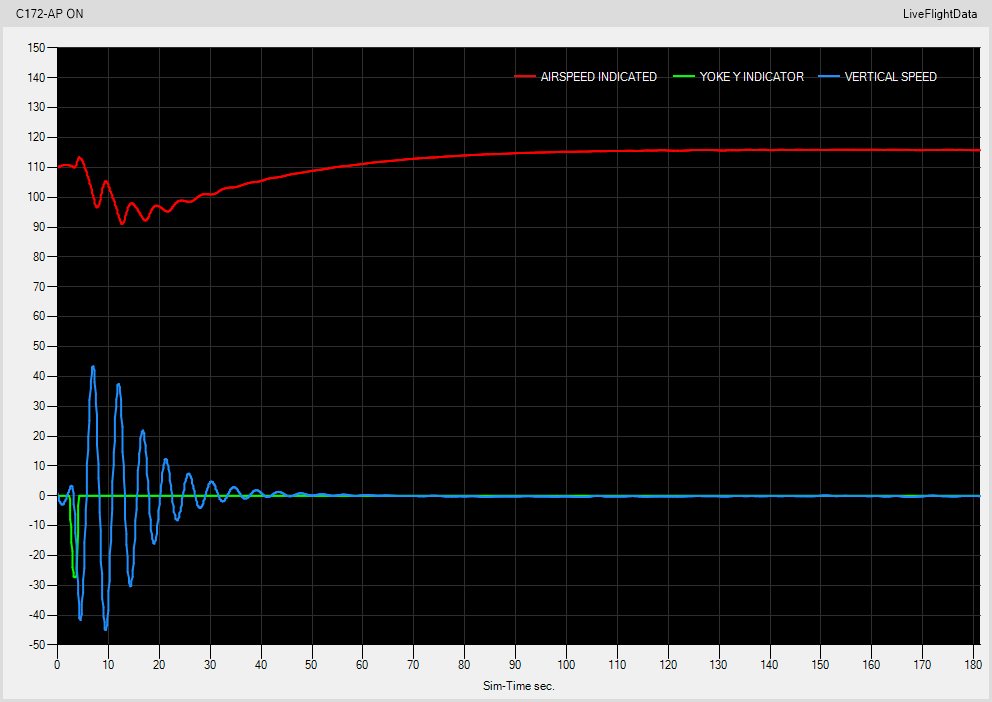
So at least it is damped, although extremely weakly damped. No wonder people find it so hard to trim. Those speed excursions are huge, 50 knots difference.
Exactly – and no point in even looking at the AP, till it has a relatively stable plane to try to control.
I do not have the latest X-Plane, but I am temped to get it, just to get the Airplane modelling tools, and to confirm that the X-Plane’s C17 is not so “Twitchie” !!!
Mine was an Impulse response… so it should try to return to the same pitch that it had before the impulse.
A step response, would have it ending up at a different pitch.
The 1st video was idea, because it showed the VS, constantly as the plane pitched… so from the video, one should be able to get a similar plot, to the one I made in the sim.
OK, having looked at the RL video, I have to admit that the stability of the Asobo c172, almost Exactly matches that of the RL video.
Well Done Asobo !!!
Both have a period of 30 seconds, and both reduce their amplitude by 50% every cycle.
I stand corrected – but i do no recall that it seemed so unstable, when actually flying the C172 in RL . Must have been … just did not notice it so much, probably because with the sensory feedback in RL, it was much easier to trim quickly, that in the sim.
In theory, the more weight in the plane towards the back, the nearer the CG gets to the CP, and the less stable the plane gets.
Flying solo, with no baggage in the rear, would give the best Dynamic pitch Stability.
Interesting exercise – one is always learning –
All this would have been a lot less noticeable, if the Cessna C172 AP, the KAP140, correctly set its VS to that of the plane, when AP is turned on, (and not the last VS that the unit has been set for) - which “can” cause the VS demand Jump so violently, and introduce the Oscillation.
Would explain why, when the KAP140 is Modded, to make it pick up the Planes VS, when the AP is turned on, that everything becomes so much more stable when the AP is turned in !!!
Look what those guys had to do to demonstrate the phugoids though: Hold the yoke back for quite a while to pull the aircraft 20 kts off its trim speed and then let go. That is not what you did at all; you just gave the yoke a push for a couple seconds and that was enough. That is what I am seeing in the C208B as well; the phugoid behavior is possibly correct, but it seems too easy to set up the phugoid in the first place.
Takes a lot of character to admit this in the way you did!
I think the difference in inducing the phigoid has a lot to do with lack of feedback and a quite linear response in the joystick, as well as very much compressed travel
Using a force feedback yoke (which is not perfect as it has limited travrl also, but a lot better) I have trouble to induce the oscillations in the way you do, I have to use quite some force
That will always remain an issue with any sim/joystick/yoke
The amplitude of the input does not affect the period of the response nor does it affect the damping ratio from one peak to another. These are inherent properties of the system.
Think of it this way, a pendulum’s period doesn’t depend on how far you pull it up, it only depends on the length of the string.
Thanks … I was really surprised, when I did the actual measurement in the Sim, as well as getting data from RL c172, that the two responses were all but identical.
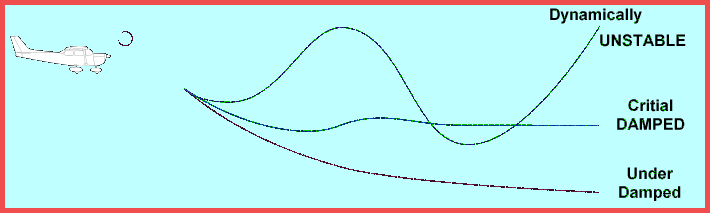
I had always “assumed” that the C172 would have a Critical damped response … I guess what it has is the best that can be got in real life.
The AP is another matter… It has a far FASTER response, and so can “Chase” the Oscillation, and dampen it out quickly.
What I did not realize, is tat when flying the plane in RL, one actually does this, chasing the oscillation, to damp it quickly.
Obviously , there is little point in trying to accurately trim the plane, until you have got any oscillation damped out.
Its taken me 30 years to finally figure this out in this detail … I guess that what they call it a "Flight SIMULATOR " !!!
Obviously. But how the amplitude of the input affects the amplitude of the phugoid depends on the static stability, and that is what I am talking about.
Think of it this way, a pendulum’s period doesn’t depend on how far you pull it up, it only depends on the length of the string.
It does though. But I get what you are after, you are talking about the small angle approximation.
I think you’re on to something, in real lIfe we are quick to almost unconsciously cancel out oscillations (as they can be felt quite well even before seing them on the horizon)
Might do a handsoff test next time IRL (in a Cherokee though) if I dare
There are a number of ways to get an Impulse Response from a system.
One is to apply an Impulse, if it is safe to do so.
If not, there is a technique where you introduce a small amount of Noise into the system, (not enough to cause any damage or even be that noticeable), and the a process called "Cross Correlation, to derive the time and frequency responses from the system, when the added “random” noise is present.