Initial testing went well, the platform is moving my weight without a problem. There is a slight “cogging” sensation that I could feel during the very slow movements. It’s a kind of “stepping” sensation coming from the motor gearboxes and making the slow movements not perfectly smooth. I never experienced it on my 2DOF rig, but I read about it being a known problem on DOFReality rigs and others. This video describes the issue on DR rig and the upgrade to fix the issue, and it sounds very similar to what I’m experiencing. The “upgrade” costs $300 per motor or $100 per motor with a new rig that already costs thousands. They acknowledge the issue by advertising the upgrade with “say goodbye to cogging” on their FB post. So I think this is what I’m feeling. It’s not very prominent on my rig, and I suspect that when I have the vibration transducers working, sending constant engine vibrations, this will be masked almost completely. I will also spend more time on tuning with SMC3 Tools. We’ll see. It’s not perceivable during moderate and fast movements at all, so it’s not an issue for combat or racing sims, but on slow banking turns it could be noticeable.
I had to cut the testing short, troubleshoot and swap one of the Arduino boards because it seemed to be defective - it randomly lost connection with the PC, even when flashing it from Arduino IDE it often flashed then timed out not getting a response from the board. After some resoldering, I tested the rig without the strut, to see how if affect cogging. It does work - and by “work” I mean there is enough power in the motors to carry my weight and move the rig around, but the cogging sensation was much worse. I could feel the stepping much more and I could even hear it very distinctly now! Yes, I could actually hear the gears in the motors going “tick-tick-tick” quickly. So I can say that a strut actually helps with cogging in a significant manner. We’ll see if cogging remains noticeable in an actual sim, once I get vibration transducers installed, with everything that’s going on on the rig. I suspect (and hope) it won’t be a problem.
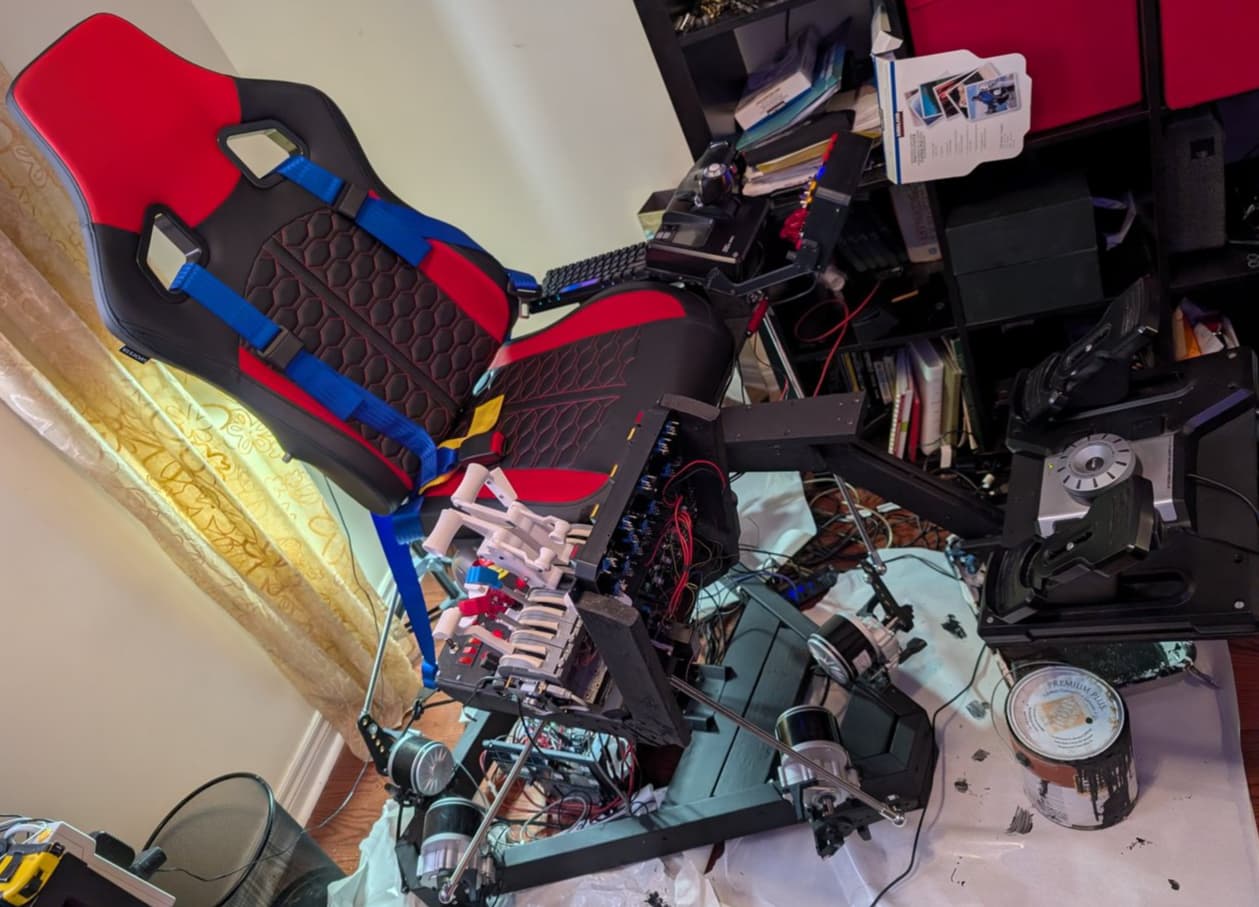
- I have constructed an attachment platform and mated my DIY pendulum yoke to it, and it will also mount a joystick and a steering wheel on demand.
- Painted whatever needed to be painted or touched up.
- Mounted left HOTAS button box, wired the USB hub etc.
- Mounted keyboard
- Mounted power amp for the vibration transducers
- I’m working on the right console now - the Arduino Leonardo based switch box with gear lever and encoder, and Arduino Mega based MCP/GPS/Autopilot panel powered by MobiFlight software.
Now that it’s nearing completion, I did a calculation of the total cost of all parts, hardware and lumber and it’s only $771. This does not include the power supplies that I got for free, the motor arms that a friend made from my design (but could be crudely made from cheap steel corners), and the motor brackets / rod brackets I cut and drilled from steel corners I had lying around. 24V 1500W PSU is ~$100 on Amazon, and a steel angle should be around $20, so the total cost with electronics, parts, hardware and materials comes to ~$900 USD. This is mind-bogglingly cheap, which was the idea!  Most parts are from Ali Express, Motors from Amazon, Motor Drivers from RobotShop, and lumber is from a local Home Depot hardware store.
Most parts are from Ali Express, Motors from Amazon, Motor Drivers from RobotShop, and lumber is from a local Home Depot hardware store.
For comparison, the cheapest off-the-shelf 6DOF motion simulator rig costs $8700 USD (plus about $400 shipping)! And that’s without some important options, which are built into my rig. If you add gas struts, an emergency stop button (a must-have), a keyboard holder, and HOTAS mounts - that’s another $260, so the total cost of the cheapest off-the-shelf rig is ~$9360 USD before taxes. Ouch! If you go for a “racing” version (with a prominent cogging issue “built-in”) it’s ~$7660. The cost of a used car… I can’t justify it on our family budget. BTW I also saved on the seat - I rigged a $100 gaming seat instead of using a proper >$400 racing seat that you have to use on an off-the-shelf rig. That was my motivation for building the rig, but also the joy of taking on such a project. Hopefully, it all works out. At least my calculations were correct, the geometry works, the motors are powerful enough and the electronics seem to be working correctly so far. It does have some disadvantages over commercial models of course, but it has some advantages as well: I believe that a wooden frame softens the most jarring motions so it feels more natural, which alleviates a known problem of metal frames. Also, the controls are way better than the usual arrangement and are tailored exactly to my taste. Anyway, I’ll update you on the news…












 - first flight test MSFS2024")