Nice one. It needs a 24V power supply, those are more expensive than 12V usually, but considering the low price it’s not much of a problem.
1 Like
yes, and for the power supply, aliexpres too at 38 € for a 600 w… really good ;), I stayed in the €300 to €400 range, the price of a used smartphone !
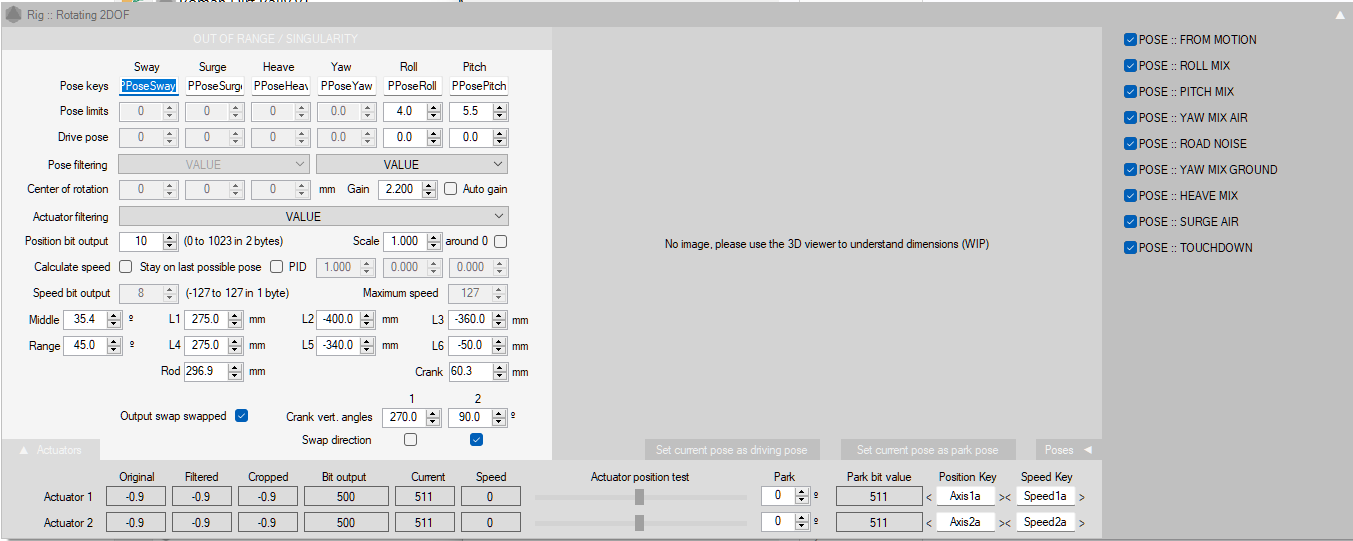
I still have the question for flyPt mover, in the RIG module during the dimension data there is below “middle”, the “range” parameter, it’s the only one whose function I don’t understand???
Edited:
Here’s my setup. As far as I recall, the “Range” parameter is the allowed range of motion of the motor arm, in degrees. In my case, 45 degrees. FlyPT software clips the input at 45 degrees, so anything beyond that is not allowed. If the arm goes beyond 45 degrees in any direction, the rig disconnects and stops with error “out of range”.
It can happen if the countering force is not strong enough to brake the motors in time.
This seems strange to me, my motors are moving more than 45 degrees and it doesn’t cut?..
Nothing serious in fact because everything works very well, but I reduced it to 20, nothing, I increased it and nothing either…
Thank you for the explanation, the rig remaining within the limits without exceeding the constraints in roll and pitch, “range” should perhaps act when it risks exceeding its constraints?..
As everything works I will avoid testing ![]()
Ask in XSimulator FlyPT topic, I’m sure the developer or others would know better. In general, the motor arms should not be allowed to move beyond total of 90 degrees, because they become inefficient past 45 degrees each way, and may not be able to move or brake properly. There should be a limit in CMS tools just beyond that angle and a cut-off if it moves more. And there should be a limit in FlyPT as well. I had some occasions when FlyPT was cut-off due to “out of range” and had to increase the current in SMC to the max. Probably due to not being able to brake a fast movement in time. I also have physical end switches that cut-off the power in the event of a runaway for whatever reason, like failure of rotation sensors etc.
1 Like
I was confused by the range setting too, Pedro told me to set to 180 and use CROP filter to limit motion in the rig. See my first page at Showroom - Smitty's Rotary Servo 6DOF build (Complete!)
1 Like
I wonder if anyone can help ![]() I have just added a third DOF to my rig. My question is how (If its even possible!!) to add the Traction Loss (YAW) to Flyptmover. its no issues if using Simtools!. I cannot find a Rig selection that would be appropriate.
I have just added a third DOF to my rig. My question is how (If its even possible!!) to add the Traction Loss (YAW) to Flyptmover. its no issues if using Simtools!. I cannot find a Rig selection that would be appropriate.
I’m not the best person to tell you how, because I only built a 2DOF, but it’s definitely possible. FlyPT Mover supports up to 6DOF. Programming it is fairly easy. I use yaw to mix it in to roll. I think you will have to create a new rig in FlyPT, you can’t just add an axis. When creating, you would choose a 3DOF design, and program all the distances etc (so write down what you had for 2DOF).
I finally released my Vancouver Island Heliports and Seaplane Bases Pack and I’m looking forward to testing it out with my motion rig. Helicopters are so much fun on a motion rig, and this scenery is all about helicopters (and seaplanes). They are made for each other.
1 Like
For those, interested in the topic, after enjoying this 2DOF motion simulator for 3 years, I have now started the build of a budget full motion 6DOF motion simulator. I’m also reworking the encoder/button/switch boxes. If it works out it will be the next level of immersion, for me at the least.
4 Likes



I have started a new topic for my 6DOF Motion Simulator project.