Question about the in-game G1000 - when conducting a VOR or localizer approach, is there any way to program in a glidepath? Similar to some RNAV approaches, where you can select Approach mode, gives you GPS & GP indications, and you can follow the dot down, similar to the vertical guidance of an ILS?
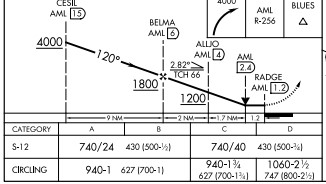
Can I program the G1000 to provide vertical guidance, of 2.82 degrees from 6 DME to the runway at 1.2 DME? And then punch “approach” and have it give me VOR (lateral) and a simulated GP as can be done on an RNAV approach?
The G1000 in VNAV mode will follow all the altitude constraints of a loaded approach but will not descend below the altitude set on the PFD. So provided you set the minimum to in this case 940 feet, the autopilot will descend the airplane. You will not see the magenta glide slope carat on the PFD as no Glide Slope is present.
Thanks for the reply. I understand no glideslope will be present, but nor is there a glideslope present on an RNAV approach, yet the G1000 can give you a glidepath to follow down, very similar to an ILS. My questions was/is there a way to program the descent angle into G1000 for a VOR or LOC approach to provide an artificial glidepath as can be done with an RNAV approach?
Now, I want to hand-fly the approach. Sounds like what you’re saying is that the G1000 cannot be setup on a VOR or LOC approach to have GP the way it can on an RNAV. In this case, seems to be I would have to do the following:
alt select to MDA
program approach waypoint altitudes into flight plan
on approach, select VNAV instead of APP
flight director on, follow the arrow down instead of following the dot on the right hand side that would be present during an ILS/RNAV approach.
This would get you to minimums, but you’d lose your vertical guidance at that point, unless you re-set your target altitude. No?
If I’m understanding you correctly, essentially you’re saying no - a VOR or LOC approach cannot be setup to fly a GP the way an RNAV can.
In the latest versions of the Xi software (GTN and G1000), most VOR approaches allow vertical guidance (it’s not available for some). It used to just show LNAV+V, but now it shows VOR +V for approaches where that is available. I’m not sure if the sim version is up to that standard.
You still need to monitor the VOR, either via a separate VOR/RMI gauge or by simply using the RMI functionality of the bearing pointer in the HSI, if so equipped.
If that’s not available, you’re basically doing the math and computing a continuous descent final approach (CDFA) path so that you can descend from the FAF to the MDA at a constant angle (rate will be dependent on groundspeed).
For a common 3° glidepath, it’s pretty easy - use 1/2 your groundspeed and multiply by 10 to get the required rate. There are tables for other descent angles in AC120-108A (also printed inside the cover of TERPS books).
As far as getting a glidepath to display on a non +V approach, it won’t be the same, but you can futz with the vnav to get the descent path line to display on the overhead map view. I wouldn’t recommend that, though, as it’s extra work and could be a distraction.
Blockquote
If that’s not available, you’re basically doing the math and computing a continuous descent final approach (CDFA) path so that you can descend from the FAF to the MDA at a constant angle (rate will be dependent on groundspeed).
For sure, that’s how I’ve been doing it all along. Calculating vertical speed & monitoring. Fine with me to keep doing it that way, was just out of sheer curiousity if the G1000 had the capability to give you a GP needle, while you monitor progress with either BRG or DME set to the nav source, to follow for that type of approach or not.