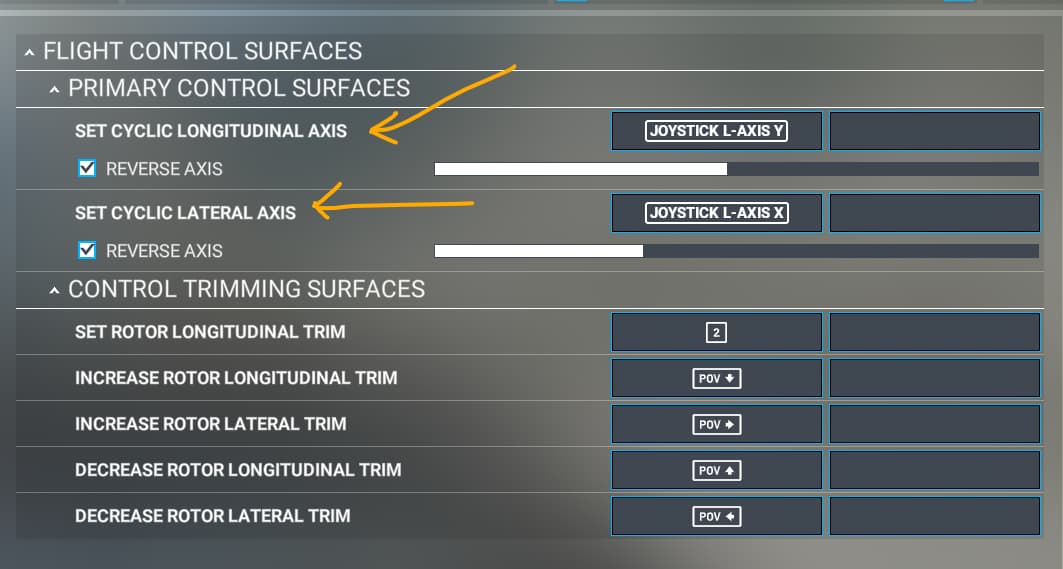
Hi, upon further testing I think I have an idea about one reason why current MSFS’s helicopter’s FM feels “FSX” like. Please note I am using a new flight model and not the legacy one and I am not using any assists (including two helicopter assists- everything is turned OFF, I even tested both legacy FM and assists ON to make sure I am not having an issue some users experienced). My controls setting are also set up correctly (both assignments and axis settings)
I am using a slightly extended Logitech G940 FFB joystick, I am also using SimFFB tool to simulate Force Trim (works great).I am going to focus on Guimbal G2 for obvious reasons.
The first thing I have noticed is how much deflection in my cyclic is needed to control the helicopter. It is nothing like I expected- I expected Cabri to be twitchy, I have watched a lot of onboards prior to new MSFS release, because I was really looking forward to this helicopter. It seems to be every bit as nimble as one would expect from this ultra light (in real life). Now in MSFS it initially felt like a medium, or heavy helicopter. It seemed super stable in hover (I literally can take my hands off when helicopter is trimmed with Force Trim IN HOVER for couple seconds and there will be close to zero drift movement happening). I was curious why that is the case given advanced FM. Then I realized- while in hover when I move my joystick fully to the side the helicopter behaves very “lazy”. Instead of tilting left reasonably quickly after a short delay (it is an ultra light helicopter, should be very nimble) it takes a while for it to tilt and then there is a significant delay that is experienced before it starts moving. You can actually move your cyclic rapidly left and right in hover and the helicopter will not do anything crazy at all!
It seems like what is happening for me (and other users who either are using extended joysticks or are used to DCS/ X-plane) is that I am not actually having a full authority over rotor disk deflection. I am only being able to tilt it a little bit. That explains why it felt “lazy” and super stable- I am having a great “resolution” near the center of the axis, but at the cost of it being “dampened” because I can’t use full range of tilt. I made this graph to explain what I think is happening in MSFS vs DCS/X-plane:
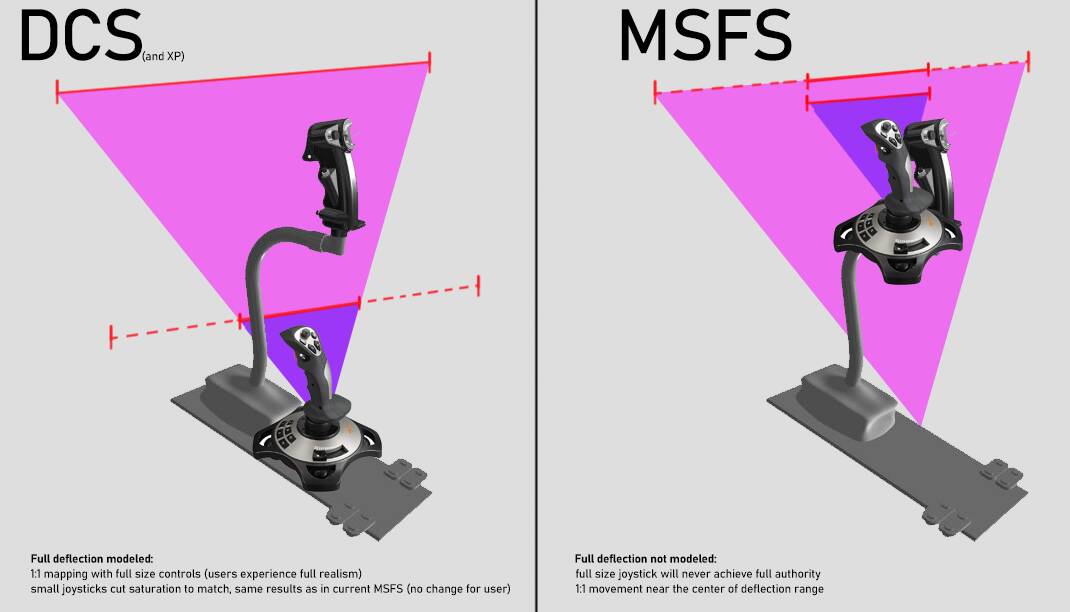
So if you are using a short joystick (99% of people) your experience will be very different to DCS/X-Plane converts. Solution:
a) Just model full range, but make default setting more applicable to short joysticks via saturation settings
b) A prompt asking user whenever he is using full size controls or a typical joystick (probably more complicated since it is easier to tweak axis settings/ presets than tweak FM)
I hope I explained my reasoning, thanks for reading.