Would anyone mind sharing their sensitivity settings for the Honeycomb yoke and PMDG737. I’m a newb at messing with these settings but right now the feel is very loose.
Would anyone mind sharing their sensitivity settings for the Honeycomb yoke and PMDG737. I’m a newb at messing with these settings but right now the feel is very loose.
If you haven’t found an answer yet I would start by bring back the pitch and roll sensitivities about 20%. Then tweak from there. The linear isn’t bad but it’s too responsive.
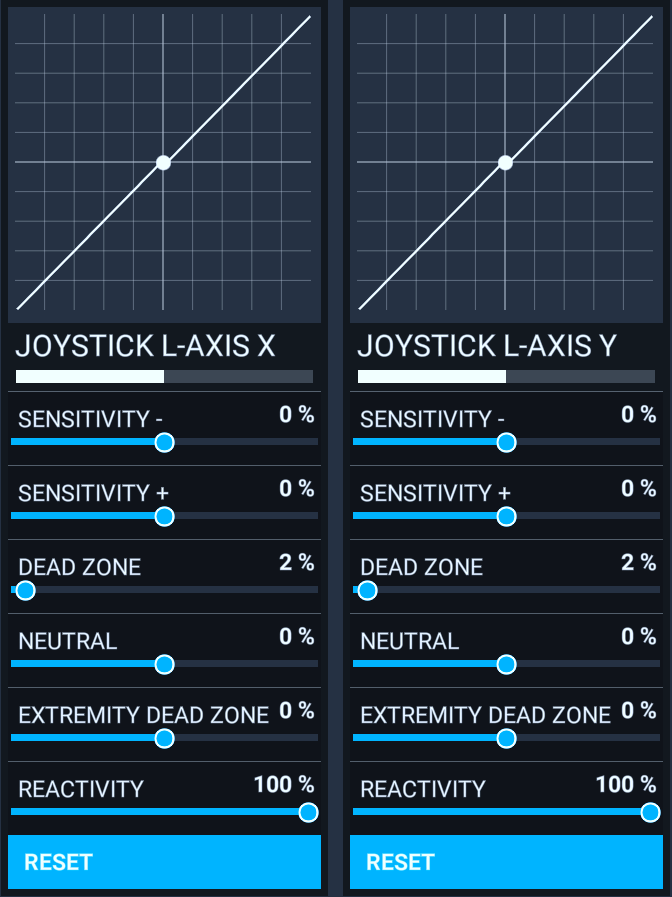
Thanks… I guess my next question would be… is pitch the X axis and roll is the Y?
Generally,
x is roll and y is pitch, but you can easy check this by move your yoke and see, easy enough.