So, the long test is over. What’s the result? Well: I have the Pico 4 connected to my PC, while my glorious Reverb G2 is in its box, ready to be shipped to the new owner (but I will forever love you, my dear good old HP).
Interesting fact: selling the G2 I basically “paid” the Pico 4 around 70 € (not counting taxes).
Before giving you my final considerations, let’s recap my system: 13900kf/4090/32 GB @ 6400.
My Internet is 1 GB down, 400 Mbps up (normally, 800/300). I use WiFi 6 on the 5 GHz band.
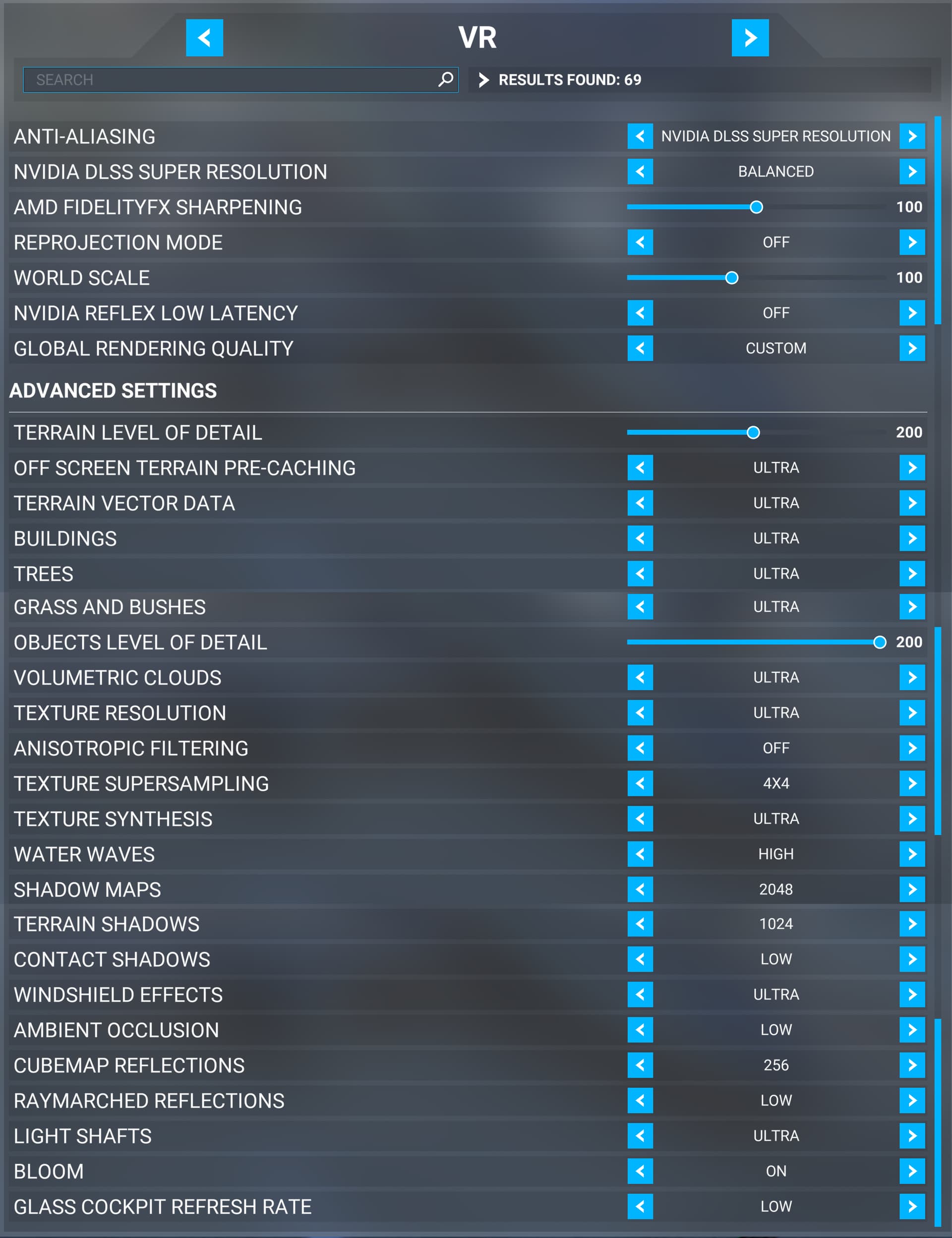
Here you can see my VR graphic configuration (Anisotropic is OFF in the simulator and 16x in nVidia control panel):

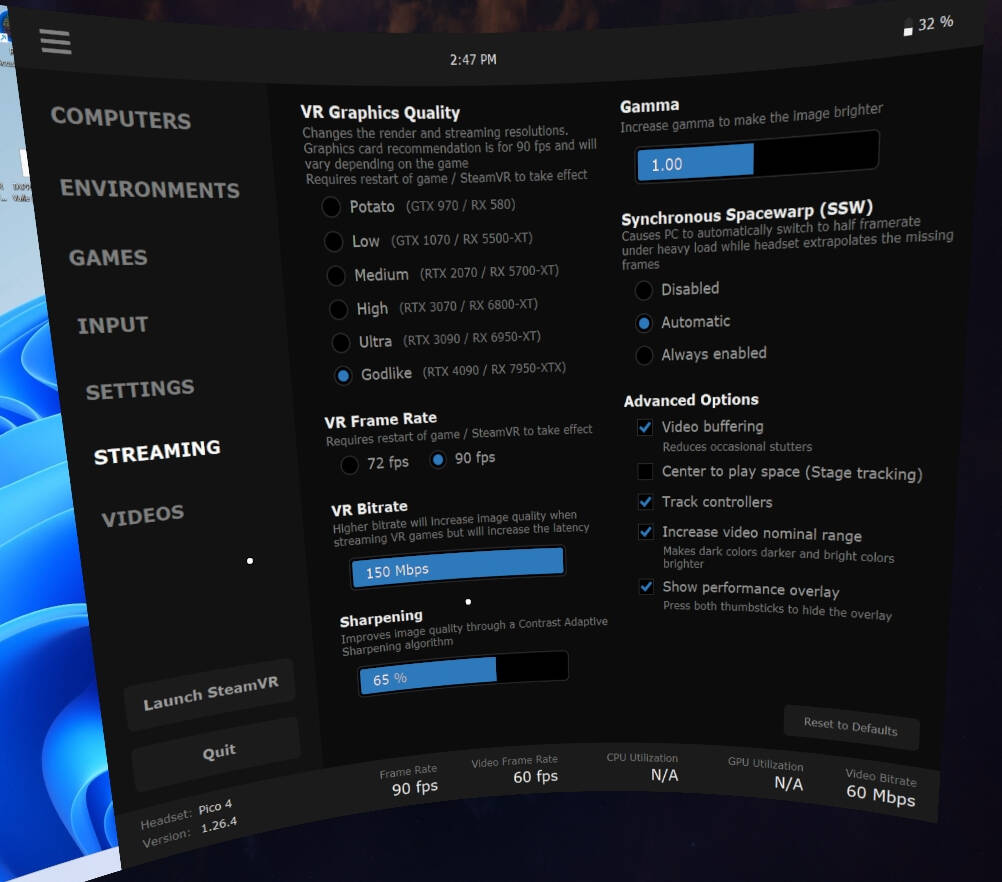
And here you can see all the settings I’m using with Virtual Desktop, in the P4 and on the PC client:


This is SteamVR:

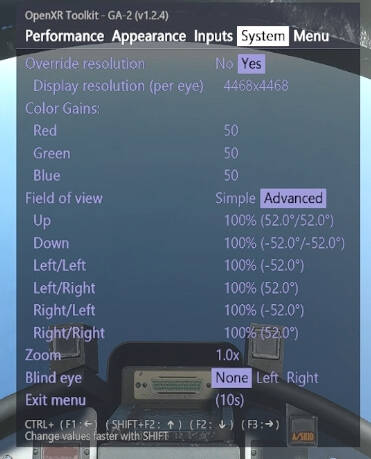
Finally, here you can see my settings in OpenXR Toolkit (posting the only menus where I changed something):
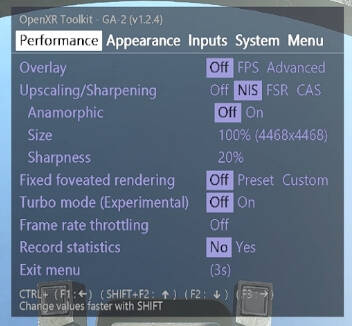
(Actually, normally I fly with Turbo Mode is “On”)
So: what made me choose the Pico 4 over the Reverb G2? Below there’s a list of Pros and Cons, but I want to say that what made the difference was how “real” flying with the P4 feels, compared to the G2. I’m talking about how the world moves around the airplane. With the G2 there was always some small issue, some stuttering that broke the illusion. With the P4, most of the time, I can watch the ground below me – on the sides as well – and think: wow, this is moving as it would in real life.
Please note: most of the time. Because the experience it’s not glitch-free, at all. And of course, all of this is valid on my PC, and we all know every configuration is a world on its own, with FS2020…
Pros:
- Once you set it up properly, FOV is (a little) wider, clarity is much higher over the whole view, comfort is great (as long as it stays wireless). And that fresh air on your face promises to be wonderful, when summer will come.
- On my system, I’m almost micro-stutters free and everything seems to move in a more “realistic” way, as mentioned above (this is probably related to the wider clarity of the view, as well). The G2 has much more stuttering, particularly in the lateral views.
- Recording (for those interested - I am) is so much easier and better! (Using OBS, but there’s even the internal tool, which I don’t recommend because it puts another task on the P4 CPU).
- You can use some options to make it smoother on slightly lower specs systems too, like 72 Hz/FPS in Virtual Desktop and Foveated rendering in OpenXR Toolkit.
- Motion Reprojection (in Virtual Desktop) works so much better than the WMR counterpart! If you fly propellers, you’ll notice huge improvements, without having to add mods.
Cons:
- WiFi: The battery doesn’t last more that 1h45mins with all cranked up. After that, I have to connect a Powerbank, or to use a connection method providing charging as well.
- WiFi: I’m connected to a WiFi 6 network (5 GHz band) and most of the time the connection is OK, but sometimes it drops a few frames. It’s quite rare (maybe 4-5 times in a 2h flight), but of course it can happen in the worst possible moment.
- WiFi: In some rare occasions, the connection is 100% gone - and when it comes back, you don’t have the plane engines audio anymore (that’s a know bug), which forces you to restart.
- USB Tethering/Router: the decoding times for the images are higher, when compared to the WiFi connection. (Actually, after further testing, it seems the Router connection has the same times for decoding, once set up properly.)
- For what concerns visuals, in the more distant views the clarity is not on par with the G2 (speaking of looking at cities near the horizon). Furthermore, it seems the most distant mountains and sometimes the lateral areas, depending on what’s there, “flicker” a little. Here I’m still tinkering the options anyway, and situation it’s slowly improving – it seems basically related to the Sharpness settings in the P4 and in the OpenXR Tookit.
These are two videos showing how nice the Pico 4 can be (image in headset is a little lower in quality, of course – but that’s just “a little”, and the definition is there:


So after evaluating all of the above I choose the P4. Then it was down to choosing the connection method:
-
Direct WiFi is the best one – most comfortable, at least until you stay wireless, and with better latencies all around. Unfortunately, it suffers from some glitches here and there (here it’s important to configure the home network to leave only the P4 – ideally – on the 5 GHz band, and of course the router should be pretty close).
-
Direct router is basically on par, apart the Decoding time being higher than WiFi, and it’s the one I choose. Less glitches, but way less comfy, and it’s not easy to set up correctly all the things you need (an extension router, probably, the network cable, the RJ45 to USB-C adaptor, the USB-C cable and most probably another USB-C female-female adaptor…). Once it works, it’s great!
-
USB Tethering – almost no glitches, but the general feeling that everything is a little more stuttery than with the other methods. Also in this case, Decoding time is up, compared to WiFi.
Here you can see two videos, where you can notice how WiFi6 always has the lowest latencies and decoding times:
USB Tethering VS WiFi Direct

Direct Router vs WiFi Direct

That’s it - should you have any comments, or questions, I’ll be happy to discuss.