I fly the Cessna 172, the Caravan 208 and the Pilatus Pc-12 NGX on a PC. With the 172 and the 208, I can use the G1000 Autopilot and VVAV to fly all the way down to the runway. For a month, I’ve been trying to duplicate that result for RNAV approaches with the Epic 2.0 system in the PC-12. I’ve watched numerous videos and read everything I can find on the subject. I watched videos by Flight Simmers and Flight Sim Rookie where they made it work. I duplicated their flights and implementation steps but no success - never able to get APR to activate no matter the stage of the flight. I’ve done numerous test flights trying to solve the puzzle but no luck. Wondering if this is just a particularly buggy aspect of the PC-12. If anyone has had reasonable success with this and they can offer suggestions or any step-by-step info, I would appreciate it. I don’t mind doing the work to test any possibility.
Strange! Never have any issue with that. Can even do APR mode on pure VFR approaches. The triangle on the right has to be almost perfectly centered and localizer/runway heading should be established when engaging. I always disengage VNAV beforehand (goes into PIT mode and keeps pitch so no problem with that). Hope that helps. Otherwise maybe share screenshots of the situation it doesn’t engage in.
Personal Comments and Observations
I was a bit of a noodge over at Working Title Discord to get the Visual Approach capability enabled. It was a bit dissonant that a jet known for it’s relative rough-field capability couldn’t perform this under coupled AP. ![]() But they coded it in like a champ.
But they coded it in like a champ.
What would help too is maybe a video right before you reach the FAF, with a particular focus on what’s happening in the PFD.
I’ll work on some screen shots but a couple of questions. Which triangle are you referring to and at what stage of the flight do you disengage VNAV - before reaching the Initial Altitude Fix, the Final Altitude Fix or some other point. Thanks
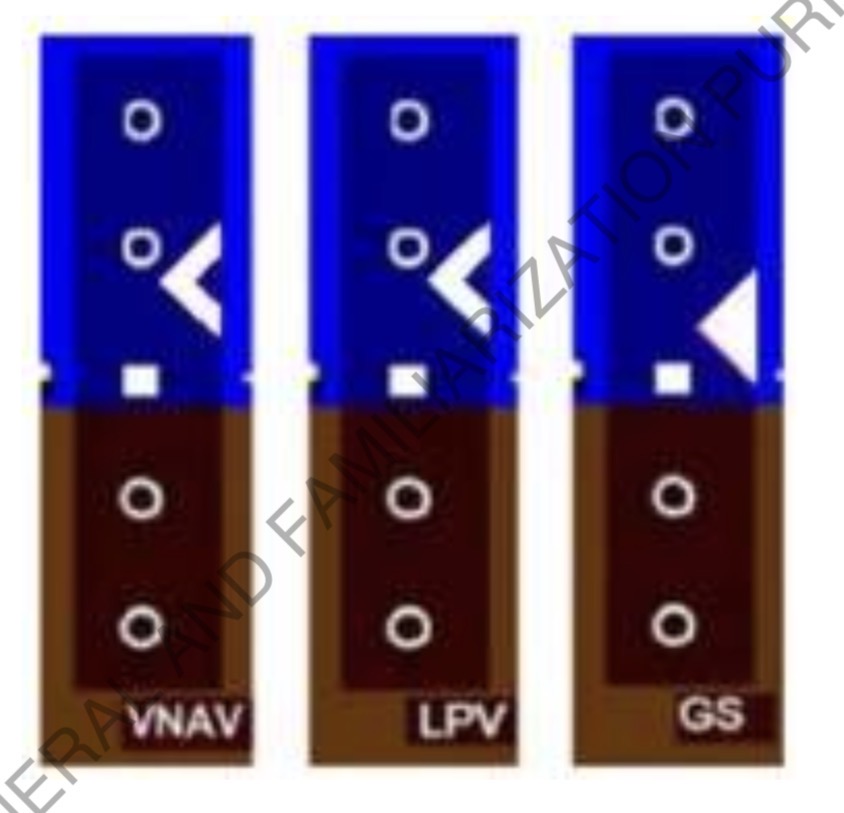
These are the triangles I am referring to. The „non filled“ are basically the virtual glideslopes based on FMS/gnss/baro data. The „filled“ one is driven by ILS. When they hit the „big“ marker in the middle it’s time to disengage VNAV and activate APR mode. And as said you should be established on runway heading. Works all the time for me. For ILS make sure that the ILS frequency is active on NAV1.