Volocity… (the proper way to label the Volocopter. “Volo” is bold, city is not).
Some things I’ve noticed:
- The climb rate seems to max out around 690 feet per minute.
- The descent rate seems to be the same… unless you turn those two red switches off mid-flight… then you plummet to the ground like a stone… there is no autorotation effect, at all.
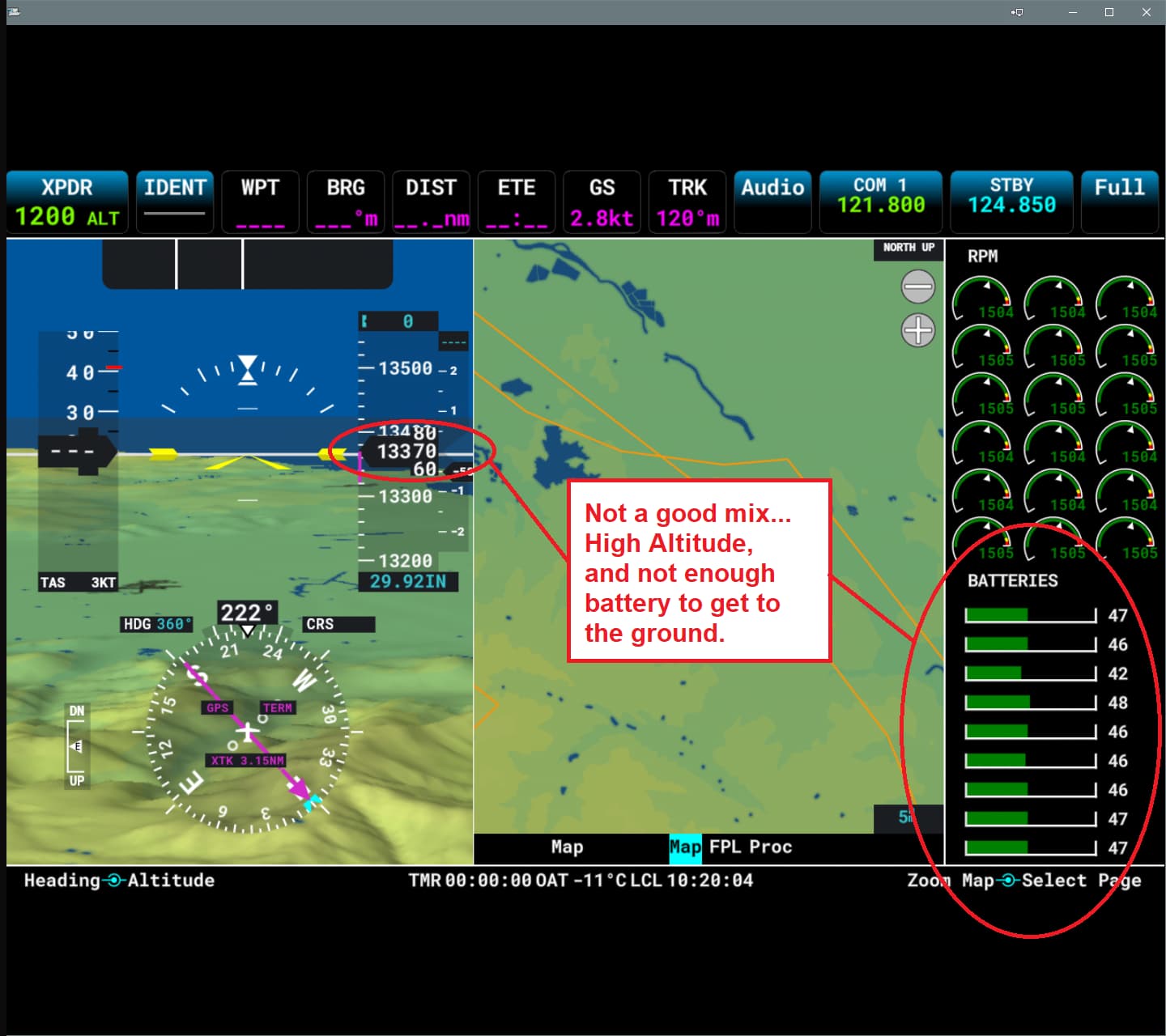
- The specifications say the maximum altitude is 2500 feet, but as a test, I put mine in “Position Hold” and maxed the climb rate, and achieved an altitude of around 7000 feet… at which time, with no pilot intervention, all controls went wonky I plummeted to the ground. Next test… I released the Position Hold around 6500 feet… flew around for a bit… reset Position Hold and continued an ascent to over 13,500 feet. It remained stable and wanted to climb some more, but I was at less than 50% battery on all 9 batteries, so I attempted a max descent, again at around 690 feet per minute. All was going well, until the batteries gave out around 3000 feet and again, I plummeted to the ground.
- The Garmin unit installed in this aircraft has very limited ability. There are some menus that have no logical way to return from… until you remember the “Back” button on the dash below… but that doesn’t always work either. “Full” and “Split” do not function correctly, as the image on the left screen does appear to be extending to full screen… the right half remains on top of it and does not reveal the “full” screen beneath.
- Although you can enter a flight plan… there is no AutoPilot to follow it. Granted, a flight plan of greater than the aircraft range would not be achievable, but with all this GPS technology on board, you would think you could create a flight plan from the front yard to grandma’s house… you know… over the river and through the woods.
- Yes… you can start from Cold and Dark. Just follow the instructions in the Check List for that aircraft and it will tell you what switches to turn on and in what order. At least it works for me, but I understand there are others for whom it does not.
- The throttle is a bit weird and does not apply in a linear fashion. There appears to be a large dead zone at the beginning of the throttle axis, even though the control configuration screen shows a more normal operation.
- I pilot my Volocity with a Logitech Extreme 3D Pro joystick, and while doing so, I have applied a null (empty of assignments) profile to both my Honeycomb Alpha Yoke and Bravo Throttle… so as not to have any conflicts between them (and I don’t have to turn their USB ports off). Since there are no real buttons to assign or features to control, I have only directional Axis and some Camera controls bound to the device. This seems to work well.
- I want to map the Position Hold to a button on my input device, but there seems to be no possible way to do that. I don’t want to bash the designers here… but isn’t that a BASIC FEATURE THAT EVERYONE WOULD WANT? (Okay… I did actually yell there - I just can’t believe something like that wasn’t available from day one).
It’s not a helicopter… it’s not meant to be. You’re not going to rip around like a Star Wars Speeder Bike (okay, I’ve dated myself there). It’s more like strapping a bunch of Box Fans together grabbing a few light switch rheostats, and putting your Cat on top… (because I’d never do that to my dog). The rotor motor positions appear to be fixed (although a few of the inner motors look like they have some predefined angle to them), but I’d expect that maneuverability is going to be limited to controlling the speed, and rotational timing of each motor independently.
There is much more to this aircraft and I hope Asobo, Microsoft, or whomever, continue to develop it.
Just my $.02.
10,000 feet and still climbing:

But… wait for it…
Jim-Sim




