You kids and your computers.
Don’t say that to a former Jetstream 32 and ATR -500 pilot  .
.
Like it or not it is the reality now, almost everything nowadays has 2 big screens and is flown with a at least Flight Director in view…
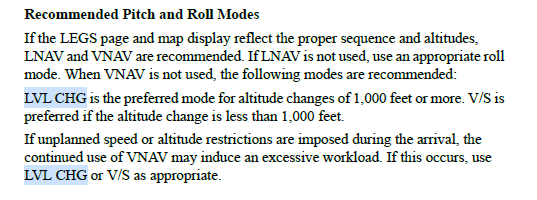
heres what the boeing fctm for the 737 says:
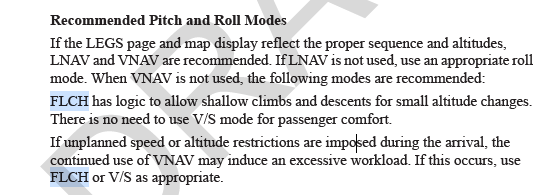
similar for the 777:
Oh yeah, and in one year the entire plane was remade and their acronyms were changed, and autopilot is completely different. (It’s nearly exactly the same)
How old is are these FCOMs?
As @anon50268670 already pointed out, you have to use v/s when climbing/descending at a high rate to avoid a TCAS TA/RA.
2008 and 2011 respectively
The first ACAS II bulletins concerning the use of v/s appeared approximately in 2012, so that explains why it isn’t mentioned in your FCOMs.
ACAS II Bulletin no. 15 (skybrary.aero)
I’ve read this 1500 ft/min within 1000 ft from level off before, I believe ICAO is recommending the same. I do think its pretty common for airlines to use the max. 2000 ft/min when 2000 ft to go and max. 1000 ft/min when 1000 ft to go, I know we are doing it that way because the airlines we are operating regional flights for (wet-lease) are demanding this.
Just for fun, in case anybody cares.
737-200 Sperry SP-77 Autopilot
How does the Autopilot handle climbs and descents?
The autopilot has very few functions but yet is very useful when you need it. It basically works on the principle of CWS (Control Wheel Steering) and will maintain “parameters” set by you.
For example: You’re just departing Edmonton Intl Airport in Canada with a fully loaded CP Air 737-200, heading to Whitehorse. As you know, aircraft are flown by pitch + power setting and airspeed. You fly V2 + 15 let’s say up to a certain altitude. (OUR version of FLC)
Now you activate the Autopilot (ELEV + AIL). The autopilot will now maintain your current heading and your current pitch. Since you control airspeed with the pitch, you see that your speed is increasing, but you want to climb with 220kt. So you pull back on the yoke until you maintain 220kt. Let’s say this gives us a pitch of 9 degrees. If you now release the yoke, the autopilot will trim the elevator trim in order to maintain 9 degrees of pitch. Now matter how fast you’re going or what the engines are doing, it will maintain 9degrees of pitch UNLESS you change something. Same with descending. Pull the power. Point the nose to the desired path and let go. The autopilot will now hold that until you change it.
@anon50268670
The pilot would then have to manually adjust the pitch cmd dial just to the right of the alt hold switch which would artificially set your fd to whatever pitch attitude you desired.
1 Like
Most autopilots still have a Control Wheel Steering (CWS) or sometimes called Touch Control Steering (TCS) function. It is more advanced nowadays though as it is not only able to maintain pitch, but also IAS or VS and ALT Hold. I hardly use this option, maybe to quickly disconnect the AP servos to feel if the aircraft is properly trimmed, when flying manually I’ll use it at times to synch the flight director to a new IAS or VS if I’m too lazy to ask the other bag of water to adjust it on the flight guidance panel  .
.
One thing that confuses me is descending to a fix. I’m usually way too high at the fix. For example, if the the distance to the fix is 20 nm and I have to descend 10,000 feet, I make a wild guess and put the v/s at -2,000 @ 250 kts and hope I make it. What am I missing? Is there anything in the FMS or autopilot where I can tell it to descend 10000 ft in 20 nm and have it compute the v/s? What I’ve been doing is checking at different points and making adjustments. If 6,000 ft and 10 nm are remaining, I know I have to descend faster so I set -2200 for v/s. Maybe I should use FLC instead?
Based on your groundspeed you’ll know your time to the fix. Based on that time and the altitude difference, you can calculate the required ROD to make it at the desired altitude.
In your example: if you’re doing 250 kt groundspeed, you’re travelling at 250/60 = 4.16 NM per minute. If you’re 20 NM from the fix, that’s 20/4.16 = 4.8 minutes to the fix.
If you have to go down by 10,000 ft in the meantime then your ROD should be 10,000/4.8 = 2083.33 ft/min, rounded 2100 ft/min.
1 Like
FMS with VNAV should be able to calculate this just fine, you can change the altitude at a fix and it should give you VNAV guidance. Without FMS / VNAV its best to plan ahead with a 3 degree glidepath, its will be the least amount of calculation and more or less what ATC is expecting from you.
- FL (or altitude / 100) to loose x 3 = Top of Descent
- Groundspeed x 5 (x 10 / 2 if that too difficult ) = Vertical speed required
In your example:
- 10.000 ft to lose = 10 x 3 = 30 nm, so start descend 30 nm before the fix.
- 250 x 5 = 1250 ft / min rate of descent.
I used to fly turboprops with only steam gauges, no FMS, no autopilot, not even a functionable flight director, this is how we have always managed our descends, you can continue crosschecking and make adjustments on the way down.
- At 27 nm to go, altitude should be 27 / 3 (x 100) = 9000 ft above.
- At 24 nm to go, altitude should be 24 / 3 (x 100) = 8000 ft above, etc.
Obviously when ATC comes with some request last minute to reach a fix at … altitude when already passed the natural 3 degree Top of Descent point, you’ll need to be a little more creative @Boufogre has described above. To add to this, if you have a GPS or FMS giving an EET (time) to the waypoint it cuts the calculation a little shorter, then its just altitude to loose / time = vertical speed.
1 Like
And usually, last minute request from ATC can make you sweat a little, especially in a jet. And they love to add a bit of a challenge by asking you to keep the speed well below what you would need to comply the first request… Ah, I miss flying and ranting about unrealistic ATC expectations lol
Thx! This is exactly what I am looking for. I was hoping that with all the computing power in the glass cockpit that maybe there was a function or button to do all the calculations. Maybe in the next gen of Garmin…
In the real G1000, there is a VNAV functionality.
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.