Ok, after taking into account the complaints of some of you about the difficulty of the AP, in addition to your proposals, I have been reviewing the documentation of the SDK in regards to the autopilot and the default settings. For those of you who know how to do it and are interested in test, I propose you to make the following changes in systems.cfg for each aircraft (those who do not know how to do it and are interested in testing, contact me privately to send the files).
First of all make a backup of the file which is located here (for f-14A, so you will have to do the same in B model):
I attach a screenshot of the autopilot section (left side proposed values, right side current values):
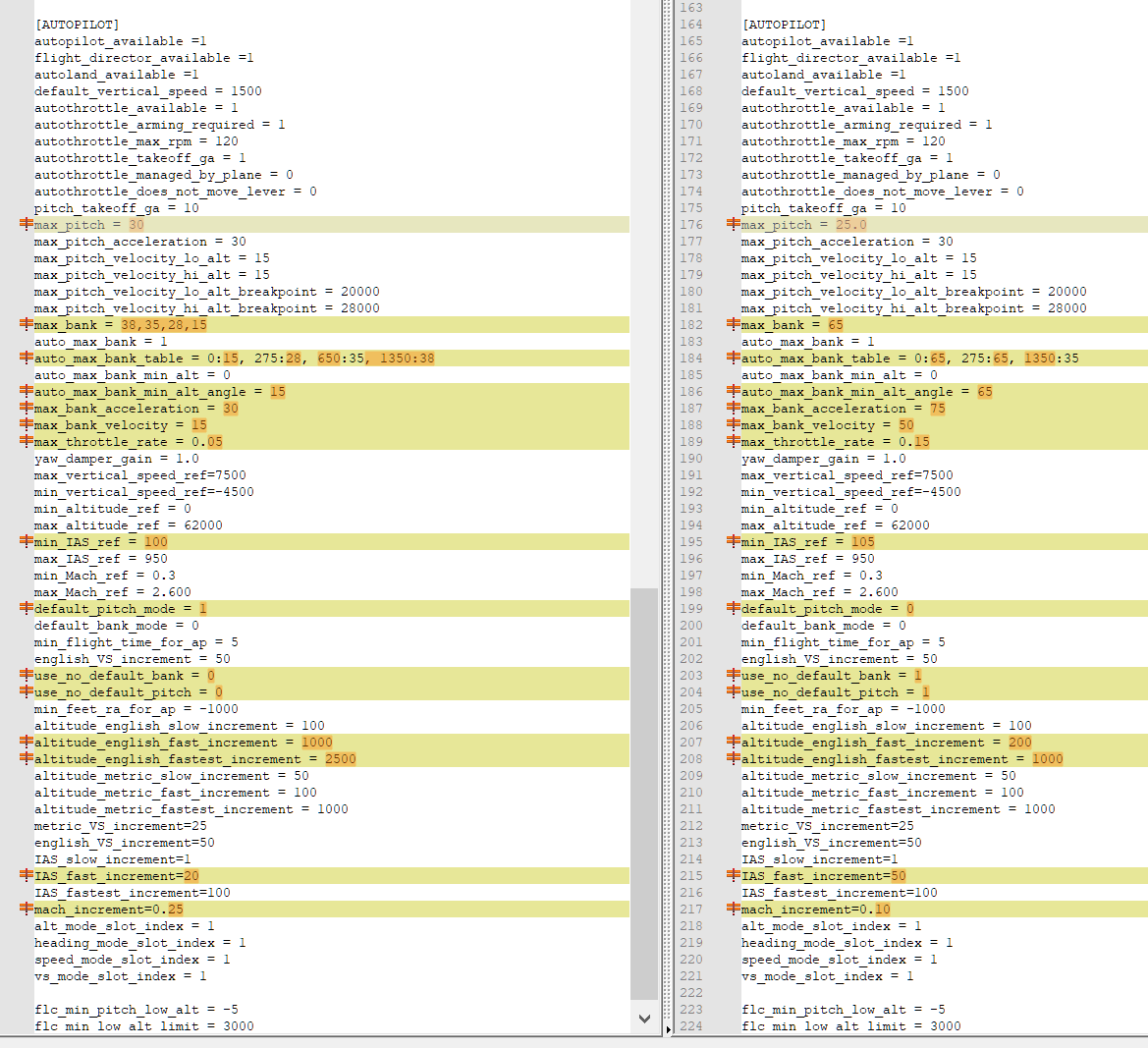
I will attach here the values to replace the old ones:
max_pitch = 30
max_bank = 38,35,28,15
auto_max_bank_table = 0:15, 275:28, 650:35, 1350:38
auto_max_bank_min_alt_angle = 15
max_bank_acceleration = 30
max_bank_velocity = 15
max_throttle_rate = 0.05
min_IAS_ref = 100
default_pitch_mode = 1
use_no_default_bank = 0
use_no_default_pitch = 0
altitude_english_slow_increment = 100
altitude_english_fast_increment = 1000
altitude_english_fastest_increment = 2500
IAS_fast_increment=20
mach_increment=0.25
and now I will try to explain the most relevant ones:
default_pitch_mode = 1
According to SDK, there are 4 default modes available when you engage AP:
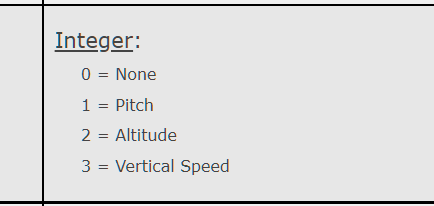
My purpose is to set pitch at default value (attitude hold), this way the aircraft will autotrim until remain leveled, so you can choose between alt hold (alt hold will maintain the current altitude until you set a target altitude) or VS hold (you set the target altitude first and press VS hold after, followed by VS keys to control climb or descend rate).
default_bank_mode = 0
According to sdk:
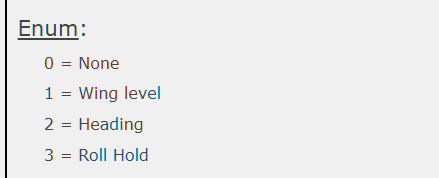
My purpose is set it to 0, so this way the aircraft will not try to follow a managed or direct heading by default (which should prevent the plane go in circles), otherwise you can test the 1 or 3 option if desired. Then, you can choose between GPS/VOR mode or HDG mode (I remind you that the HDG knob on the right console has the modes selected and managed even though it does not have a tooltip, up arrow managed, down arrow selected, the “managed” mode will follow the flight plan in a similar way to NAV, while “selected” one follow the HDG bug, so I recommend that you center it before by pushing HDG in central console).
max_bank = 38,35,28,15
auto_max_bank_table = 0:15, 275:28, 650:35, 1350:38
This is a table enabling 4 possible bank levels (@DeathPantsX , This part interests you especially).
As you already know, the f-14 is not an airliner so there is no knob that allows you to select between these bank limits, so instead I have created an autobank table with the following behavior:
- from 0 to 275 knots the max bank will scale from 15 to 28 degrees max.
- from 275 to 650 → 35 degrees max
- from 650 to top speed will be 38 degrees max.
We are replacing the 65 degrees bank we had before, so this should correct undesired oscillations at different speeds.
max_bank_acceleration = 30
max_bank_velocity = 15
This should basically soften bank changes handled from AP.
max_throttle_rate = 0.05
this should contribute the throttle movements carried out during autothrottle to be smoother when accelerating or braking, or maintaining speeds compared with current one.
Before carrying out any update that leads to changes in this regard, I will always want to hear your proposals and opinions, but always within a reasonable context. Remember this is a fighter
that as Dean said, it has a basic Pitch and alt hold system, NAV and HDG modes and autothrottle with ACLS MODE, not an airplane with a system that does it all for you.
however, the idea that some of you are using it to practice real procedures is something that pleases me enormously and I want to keep it that way.
Always at your disposal.

