So many questions 
Many of them will be answered in my readme here and in my Wiki here.
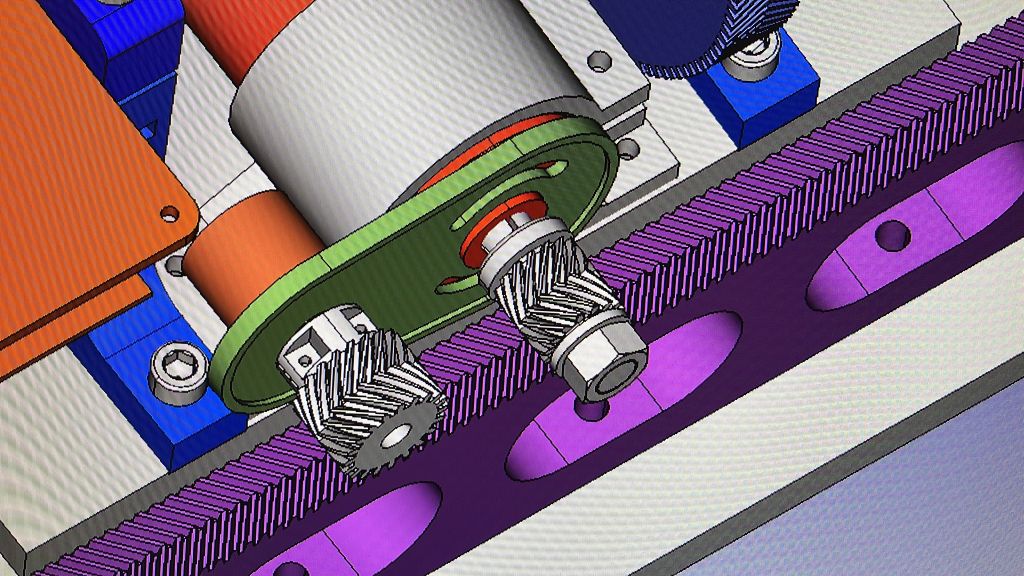
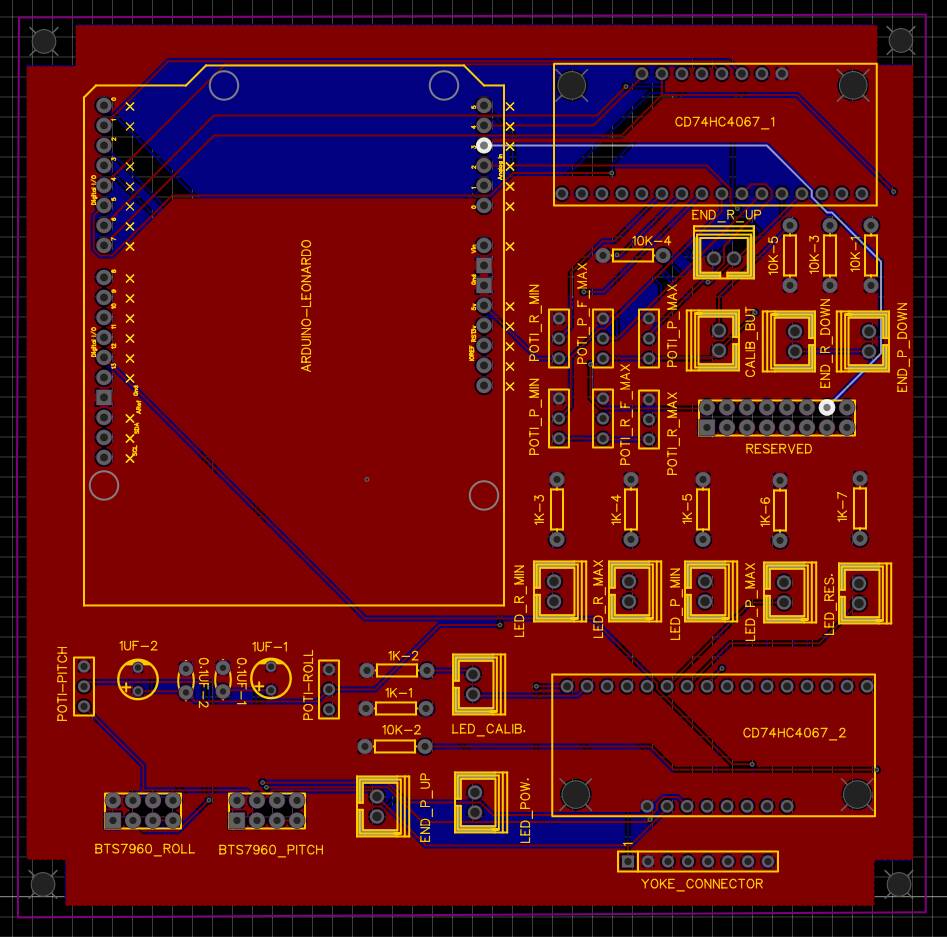
Ok, i’ve been using BTS7960 Motor drivers for the 775DC Motors with a 24V Power Supply. You can also use 12V and i would start testing with it.
You need all Codefiles in the main Directory and alls files from the src Directory. You have to put it into a Directory called “Arduino_FFB_Yoke”, this is very important because Arduino Studio will give out an Error-Message when the Directory Name ist different.
The "Arduino_FFB_Yoke.ino is the main File. Here are the main definitions and main routines for the Joystick. With “#define DEBUG” jou active the serial output for viewing the variables with the “Serial Plotter” from Tools Menu.
The line
Joystick_ Joystick(
JOYSTICK_DEFAULT_REPORT_ID, JOYSTICK_TYPE_JOYSTICK,
19, 2, // Button Count, Hat Switch Count
true, true, false, // X, Y, Z
false, false, false, // Rx, Ry, Rz
true, true); // rudder, throttle
is the Joystick definition, what Type of Joystick, how many Axes, how many Buttons,…
Important in this case is also the JOYSTICK_DEFAULT_REPORT_ID, it defines the Name of the USB Joystick and the ID. This is important when you want to use more than one Arduino Joystick. See my ready (Important Info section) in my Readme in the main directory.
The “joystick.ino” contains the Joystick setup and effect calculations. It’s not created by me it’s from the Fino GitHub Project. The Config.h (Header File) also. In this files you can adjust the effects but iT#s not easy to understand, for me, too.
The “Arduino.ino” is the interface file between the Arduino Hardware and the Joystick. Main main content is created by me. It defines the Pin states adn sets the PWM Timers to 31.25 kHZ speed. It Reads the Poti positions, calculates the PWM speeds and drives the motors.
It also ready the button states by a Multiplexer but it’s not finished yet. I’m waiting for a tactile 5 way swich to finish the CadetYoke and it will takes some weeks to deliver.
I will check the AirForce Player hopefully this weekend. thx for it.
Where are you from? I’m from Germany and see that you replies always in the middle of the night so i guess you are in an complete different timezone?
I’m thinking about to create an Dicord channel on my Server so we can make a better communication about this project if you and the other Interrests want?