Unearthing an old thread here, but simply because it is VERY relevant to something I’m pursuing and the discussion here is fantastic! I’ll give a brief summary below of what I’m doing, but forewarned I can be very long winded, so I’ll try my best to stay “brief” 
Over the last year and a half I’ve been working on a flight sim yoke. Initially this started out as a personal project for an updated home cockpit I was building, but after sharing it with others in the community I found it may help fill a gap in the market. Again, to stay brief, the concept was to create a yoke for simmers that checked all the boxes most commercial yokes don’t; in short, lowest price possible at the quality threshold I wanted to achieve. This meant (at minimum) 12 bit precision, magnetic hall sensors, adjustable tension, quality hardware/components, custom PCBs, and most importantly interchangeable handles. I was able to achieve that and late last year began offering the yoke for sale https://skytation.store. I also have a view videos of it on my YouTube channel https://youtube.com/@Skytation
The response from the community has been great, but the number one comment I receive is why isn’t it force feedback? Well, simply put, FFB is way over my head… at least in terms of developing something custom for this specific yoke. However, in the last few months I’ve happened upon VPForce/TelemFFB which seems to be very promising in terms of DIY FFB with the motors/boards/software all being provided by VPForce, and the software being open source which as allowed the community to expand on it with custom aircraft profiles and all that. While this seems like a promising solution to help adapt my yoke design to FFB, it still comes at a cost. There is a bit of learning curve, the software/aircraft profiles aren’t perfect (for GA), and a kit from VPForce that includes the motors and control board (you’d still need a power supply, cooling fans, etc) starts at around $325 USD.
I’ve been pretty set on pursuing VPForce as the solution to help enhance my yoke and increase the realism, however from talking with others in the community (mainly IRL pilots) the majority of them have said vibrations, variable forces depending on aircraft/speed/conditions, and things like that aren’t necessarily at the top of their list when it comes to improving on standard bungee/spring yokes. They said mainly it’s the trimming process and how unrealistic it is with non-FFB yokes in the sim.
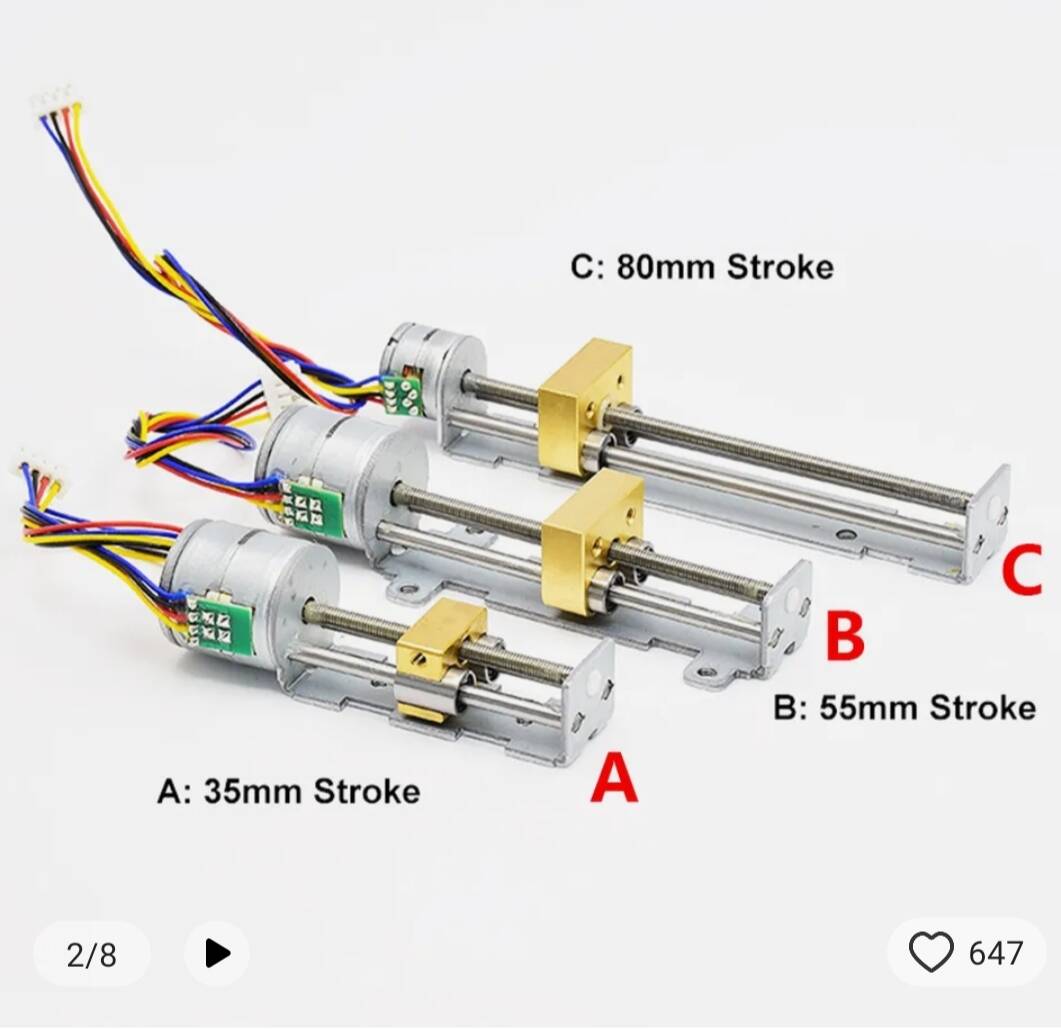
And that’s how I landed at this post… I started looking into how I could solve that issue without at least doubling the cost of my current yoke design. Initially the solution was pretty simple, I just needed a way to decrease the amount of tension in the yoke (bungees) as trim was applied. Naturally, based on how my yoke is designed, that meant moving the center point of where the bungee attaches to the sliding gantry. So I started googling about solutions to that issue and I landed on this post, and what you’ve designed here is almost exactly what I had considered; having the bungee attachment point on a ball screw so that its position could become variable/adjustable on the sliding gantry. In my mind, that’s the perfect solution to the trimming problem on non-FFB yokes.
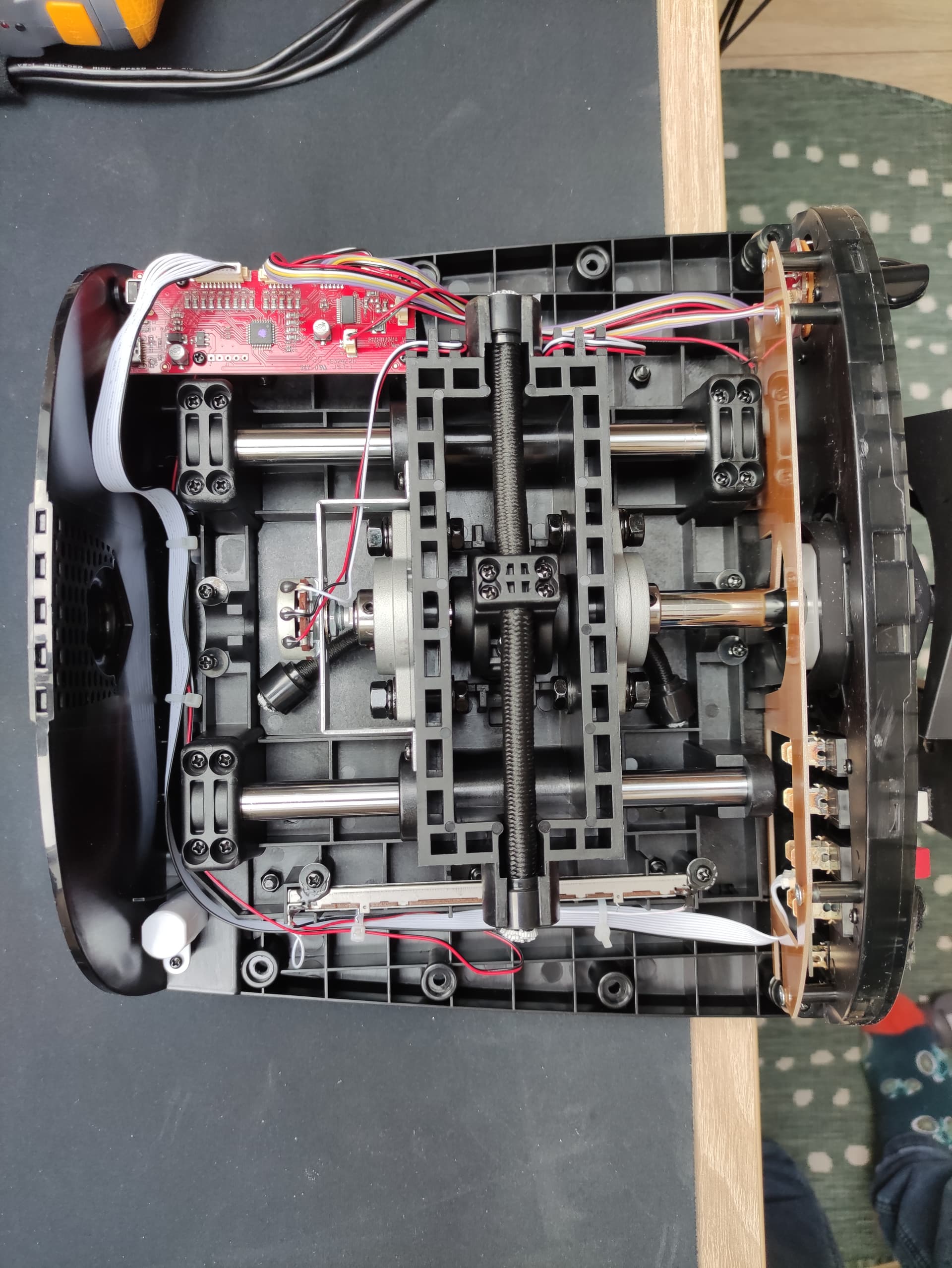
That being said, I just have a couple questions for you (or anyone else familiar with this type of solution). How does it affect the yoke position sensors and how that data is transmitted to the sim (and I’m just talking pitch axis right now)? In other words, my current design utilizes a geared wheel underneath the sliding gantry which runs along a rack fixed on the extrusion frame. That geared wheel has a magnet on it which rotates around an AS5600 hall sensor which then sends the position data to the sim. So obviously once I’ve built the yoke, I calibrate them using the center position once all bungees are attached and engaged. If I were to incorporate a trimming solution similar to what is being discussed here, would that not mean a new “center” position of the yoke would be established any time it is trimmed up or down? In other words, if I trim up a few clicks the yoke handle would theoretically move closer to my body and the data sent to the sim would be that the yoke is sitting in a slight pitched up location. It would also think my pitch trim is sitting at a few clicks up assuming I have it set up so the trim button on the handle (or external trim wheel) being used is mapped to adjust the trim in the sim. Am I thinking about that correctly? If so, I mean the simple solution there is just don’t map the trim switch/wheel to actually make trim changes in the sim and simply let them move the physical yoke. I hope I’m thinking about that correctly, and I hope it was easy to understand as I wrote it. If not, let me know and I’ll try and explain it better.
Bottom line, what I’m wanting to do with this whole yoke project going forward is begin offering it in a kit form which would cut the price nearly in half. Basically my goal is to offer kits (both for handles and the base unit) which would include all non plastic (3D printed) parts. So basically you’d get the aluminum extrusion pieces, the hardware, all the wires/cables, PCBs, linear rails/bearings, etc, and then all the STL files for the printed parts would be out on Printables to allow you to go in and print and your own parts. This gives you full control over color, filament type, etc. But more importantly it also means if anything plastic were to ever break you have the full catalog of replacement part files right there and you can simply go in and print your replacement part. As I said earlier, the goal here is to give simmers a yoke that checks all the boxes, that can be customized to fit lots of different aircraft given the (eventual) library of handle designs I’ll be putting out there as I finish them, and most importantly allows them modify and repair their units as they wish.
Bungee and spring yokes are nothing new, and so even though I feel like my current design adds lots more value than some of the ones currently out there via my easy change handle design, it’s still just another bungee/return to center yoke. I really think adding something like this adjustable trim feature would help make it desirable and useful to a lot more people who simply want to remedy that immersion killer with the trim, but don’t want to break the bank and deal with learning curve that comes with full on FFB.
I welcome any feedback, comments, ideas, and anything else you may want to share. I think this idea with the ball screw to mechanically adjust the bungee center is a great idea, I just wanted to make this post to see if anyone could help me on those couple questions I had above. 
Oh, and I just thought of one more thing, how will this affect auto pilot in the sim? I believe it operates under the assumption your yoke is always in a centered position, no? I feel like maybe this would cause some big hiccups with that…
NOTE: I should mention, this mainly only applies to GA style aircraft with push/pull yoke types. I know airliners and other fly-by-wire systems don’t necessarily behave this way, but that’s also why I’m building a pendular style base as well to help fill that need. It will share the same quick handle attachment system so that all handle designs I create can go on either yoke base seamlessly, but it won’t incorporate any of this adjustable trim logic since FBW aircraft typically always return to center when no force is being applied (as I understand it). I just wanted to make that comment since some people reading this who fly airliners may think this won’t work at all for those aircraft.